Tensor Mechanics System Design Description
This template follows INL template TEM-140, "IT System Design Description."
This document serves as an addendum to Framework System Design Description and captures information for SDD specific to the Tensor Mechanics application.
Introduction
Frameworks are a software development construct aiming to simplify the creation of specific classes of applications through abstraction of low-level details. The main object of creating a framework is to provide an interface to application developers that saves time and provides advanced capabilities not attainable otherwise. The MOOSE, mission is just that: provide a framework for engineers and scientists to build state-of-the-art, computationally scalable finite element based simulation tools.
MOOSE was conceived with one major objective: to be as easy and straightforward to use by scientists and engineers as possible. MOOSE is meant to be approachable by non-computational scientists who have systems of PDEs they need to solve. Every single aspect of MOOSE was driven by this singular principle from the build system to the API to the software development cycle. At every turn, decisions were made to enable this class of users to be successful with the framework. The pursuit of this goal has led to many of the unique features of MOOSE:
A streamlined build system
An API aimed at extensible
Straightforward APIs providing sensible default information
Integrated, automatic, and rigorous testing
Rapid, continuous integration development cycle
Codified, rigorous path for contributing
Applications are modular and composable
Each of these characteristics is meant to build trust in the framework by those attempting to use it. For instance, the build system is the first thing potential framework users come into contact with when they download a new software framework. Onerous dependency issues, complicated, hard to follow instructions or build failure can all result in a user passing on the platform. Ultimately, the decision to utilize a framework comes down to whether or not you trust the code in the framework and those developing it to be able to support your desired use-case. No matter the technical capabilities of a framework, without trust users will look elsewhere. This is especially true of those not trained in software development or computational science.
Developing trust in a framework goes beyond utilizing "best practices" for the code developed, it is equally important that the framework itself is built upon tools that are trusted. For this reason, MOOSE relies on a well-established code base of libMesh and PETSc. The libMesh library provides foundational capability for the finite element method and provides interfaces to leading-edge numerical solution packages such as PETSc.
With these principles in mind, an open source, massively parallel, finite element, multiphysics framework has been conceived. MOOSE is an on-going project started in 2008 aimed toward a common platform for creation of new multiphysics tools. This document provides design details pertinent to application developers as well as framework developers.
Use Cases
The MOOSE Framework is targeted at two main groups of actors: Developers and Users. Developers are the main use case. These are typically students and professionals trained in science and engineering fields with some level of experience with coding but typically very little formal software development training. The other user group is Users. Those who intend to use an application built upon the framework without writing any computer code themselves. Instead they may modify or create input files for driving a simulation, run the application, and analyze the results. All interactions through MOOSE are primarily through the command-line interface and through a customizable block-based input file.
System Purpose
The Software Design Description provided here is description of each object in the system. The pluggable architecture of the framework makes MOOSE and MOOSE-based applications straightforward to develop as each piece of end-user (developer) code that goes into the system follows a well-defined interface for the underlying systems that those object plug into. These descriptions are provided through developer-supplied "markdown" files that are required for all new objects that are developed as part of the framework, modules and derivative applications. More information about the design documentation can be found in Documenting MOOSE.
System Scope
The purpose of this software is to provide several libraries that can be used to build an application based upon the framework. Additionally, several utilities are provided for assisting developers and users in end-to-end FEM analysis. A brief overview of the major components are listed here:
| Component | Description |
|---|---|
| framework library | The base system from which all MOOSE-based applications are created |
| module libraries | Optional "physics" libraries that may be used in an application to provide capability |
| build system | The system responsible for creating applications for a series of libraries and applications |
| test harness | The extendable testing system for finding, scheduling, running, and reporting regression tests |
| "peacock" | The GUI for building input files, executing applications, and displaying results |
| MooseDocs | The extendable markdown system for MOOSE providing common documentation and requirements enforcement |
| "stork" | The script and templates for generating a new MOOSE-based application ready for building and testing |
| examples | A set of complete applications demonstrating the use of MOOSE's pluggable systems |
| tutorials | Step by step guides to building up an application using MOOSE's pluggable systems |
| unit | An application for unit testing individual classes or methods of C++ code |
Dependencies and Limitations
The MOOSE platform has several dependencies on other software packages and has scope that is constantly evolving based upon funding, resources, priorities, and lab direction. However, the software is open-source and many features and even bugs can be offloaded to developers with appropriate levels of knowledge and direction from the main design team. The primary list of software dependencies is listed below. This list is not meant to be exhaustive. Individual operating systems may require specific packages to be installed prior to using MOOSE, which can be found on the Install MOOSE pages.
| Software Dependency | Description |
|---|---|
| libMesh | Finite Element Library and I/O routines |
| PETSc | Solver Package |
| hypre | Multigrid Preconditioner |
| MPI | A distributed parallel processing library (MPICH) |
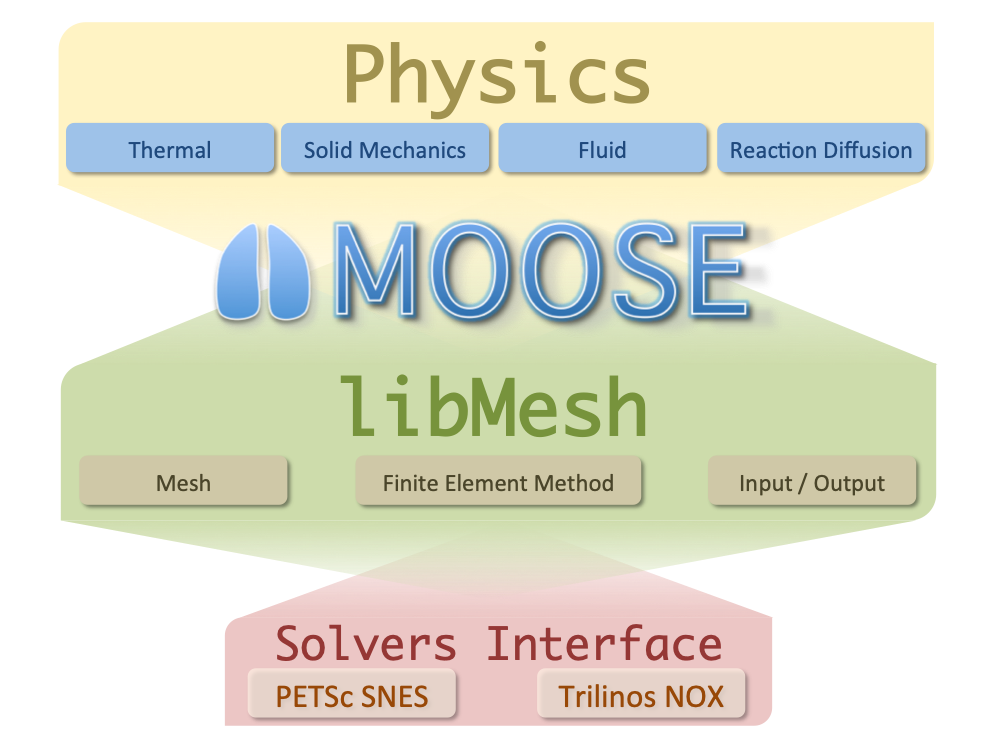
Figure 1: A diagram of the MOOSE code platform.
References
Definitions and Acronyms
This section defines, or provides the definition of, all terms and acronyms required to properly understand this specification.
Definitions
- Pull (Merge) Request: A proposed change to the software (e.g. usually a code change, but may also include documentation, requirements, design, and/or testing). - Baseline: A specification or product (e.g., project plan, maintenance and operations (M&O) plan, requirements, or design) that has been formally reviewed and agreed upon, that thereafter serves as the basis for use and further development, and that can be changed only by using an approved change control process (NQA-1, 2009). - Validation: Confirmation, through the provision of objective evidence (e.g., acceptance test), that the requirements for a specific intended use or application have been fulfilled (24765:2010(E), 2010). - Verification: (1) The process of: evaluating a system or component to determine whether the products of a given development phase satisfy the conditions imposed at the start of that phase. (2) Formal proof of program correctness (e.g., requirements, design, implementation reviews, system tests) (24765:2010(E), 2010).
Acronyms
| Acronym | Description |
|---|---|
| API | Application Programming Interface |
| DOE-NE | Department of Energy, Nuclear Energy |
| FE | finite element |
| FEM | Finite Element Method |
| GUI | graphical user interface |
| HIT | Hierarchical Input Text |
| HPC | High Performance Computing |
| I/O | Input/Output |
| INL | Idaho National Laboratory |
| MOOSE | Multiphysics Object Oriented Simulation Environment |
| MPI | Message Passing Interface |
| PDEs | partial differential equations |
| SDD | Software Design Description |
Design Stakeholders and Concerns
Design Stakeholders
Stakeholders for MOOSE include several of the funding sources including DOE-NE and the INL. However, Since MOOSE is an open-source project, several universities, companies, and foreign governments have an interest in the development and maintenance of the MOOSE project.
Stakeholder Design Concerns
Concerns from many of the stakeholders are similar. These concerns include correctness, stability, and performance. The mitigation plan for each of these can be addressed. For correctness, MOOSE development requires either regression or unit testing for all new code added to the repository. The project contains several comparisons against analytical solutions where possible and also other verification methods such as MMS. For stability, MOOSE maintains multiple branches to incorporate several layers of testing both internally and for dependent applications. Finally, performance tests are also performed as part of the the normal testing suite to monitor code change impacts to performance.
System Design
The MOOSE framework itself is composed of a wide range of pluggable systems. Each system is generally composed of a single or small set of C++ objects intended to be specialized by a Developer to solve a specific problem. To accomplish this design goal, MOOSE uses several modern object-oriented design patterns. The primary overarching pattern is the "Factory Pattern". Users needing to extend MOOSE may inherit from one of MOOSE's systems to providing an implementation meeting his or her needs. The design of each of these systems is documented on the mooseframework.org wiki in the Tutorial section. Additionally, up-to-date documentation extracted from the source is maintained on the the mooseframework.org documentation site after every successful merge to MOOSE's stable branch. After these objects are created, the can be registered with the framework and used immediately in a MOOSE input file.
System Structure
The MOOSE framework architecture consists of a core and several pluggable systems. The core of MOOSE consists of a number of key objects responsible for setting up and managing the user-defined objects of a finite element simulation. This core set of objects has limited extendability and exist for every simulation configuration that the framework is capable of running.
Adaptivity
Adaptivity/Indicators
Adaptivity/Markers
AuxKernels
AuxKernels/MatVecRealGradAuxKernel
AuxKernels/MaterialVectorAuxKernel
AuxKernels/MaterialVectorGradAuxKernel
AuxScalarKernels
AuxVariables
AuxVariables/MultiAuxVariables
BCs
BCs/CavityPressure
BCs/CoupledPressure
BCs/InclinedNoDisplacementBC
BCs/Periodic
BCs/Pressure
Bounds
Closures
Components
Constraints
Contact
ControlLogic
Controls
CoupledHeatTransfers
Covariance
DGKernels
Dampers
Debug
Debug/MaterialDerivativeTest
DeprecatedBlock
DiracKernels
Distributions
DomainIntegral
Executioner
Executioner/Adaptivity
Executioner/Predictor
Executioner/Quadrature
Executioner/TimeIntegrator
Executioner/TimeStepper
Executors
FVBCs
FVInterfaceKernels
FVKernels
FluidPropertiesInterrogator
Functions
GeochemicalModelInterrogator
GlobalParams
GrayDiffuseRadiation
HeatStructureMaterials
ICs
ICs/PolycrystalICs
ICs/PolycrystalICs/BicrystalBoundingBoxIC
ICs/PolycrystalICs/BicrystalCircleGrainIC
ICs/PolycrystalICs/PolycrystalColoringIC
ICs/PolycrystalICs/PolycrystalRandomIC
ICs/PolycrystalICs/PolycrystalVoronoiVoidIC
ICs/PolycrystalICs/Tricrystal2CircleGrainsIC
InterfaceKernels
Kernels
Kernels/CHPFCRFFSplitKernel
Kernels/DynamicTensorMechanics
Kernels/HHPFCRFFSplitKernel
Kernels/PFCRFFKernel
Kernels/PolycrystalElasticDrivingForce
Kernels/PolycrystalKernel
Kernels/PolycrystalStoredEnergy
Kernels/PoroMechanics
Kernels/RigidBodyMultiKernel
Kernels/TensorMechanics
Materials
Mesh
Mesh/Partitioner
Modules
Modules/CompressibleNavierStokes
Modules/FluidProperties
Modules/HeatConduction
Modules/HeatConduction/ThermalContact
Modules/HeatConduction/ThermalContact/BC
Modules/IncompressibleNavierStokes
Modules/NavierStokesFV
Modules/Peridynamics
Modules/Peridynamics/Mechanics
Modules/Peridynamics/Mechanics/GeneralizedPlaneStrain
Modules/Peridynamics/Mechanics/Master
Modules/PhaseField
Modules/PhaseField/Conserved
Modules/PhaseField/DisplacementGradients
Modules/PhaseField/EulerAngles2RGB
Modules/PhaseField/GrainGrowth
Modules/PhaseField/GrandPotential
Modules/PhaseField/Nonconserved
Modules/PorousFlow
Modules/PorousFlow/BCs
Modules/TensorMechanics
Modules/TensorMechanics/CohesiveZoneMaster
Modules/TensorMechanics/DynamicMaster
Modules/TensorMechanics/GeneralizedPlaneStrain
Modules/TensorMechanics/GlobalStrain
Modules/TensorMechanics/LineElementMaster
Modules/TensorMechanics/Master
Modules/TensorMechanics/MaterialVectorBodyForce
MortarGapHeatTransfer
MultiApps
NodalKernels
NodalNormals
Outputs
PorousFlowBasicTHM
PorousFlowFullySaturated
PorousFlowUnsaturated
Postprocessors
Preconditioning
Problem
RayBCs
RayKernels
ReactionNetwork
ReactionNetwork/AqueousEquilibriumReactions
ReactionNetwork/SolidKineticReactions
Reporters
Samplers
ScalarKernels
SpatialReactionSolver
StochasticTools
Surrogates
ThermalContact
TimeDependentReactionSolver
TimeIndependentReactionSolver
Trainers
Transfers
UserObjects
Variables
Variables/CHPFCRFFSplitVariables
Variables/HHPFCRFFSplitVariables
Variables/PFCRFFVariables
Variables/PolycrystalVariables
VectorPostprocessors
XFEM
The MooseApp is the top-level object used to hold all of the other objects in a simulation. In a normal simulation a single MooseApp object is created and "run()". This object uses it's Factory objects to build user defined objects which are stored in a series of Warehouse objects and executed. The Finite Element data is stored in the Systems and Assembly object while the domain information (the Mesh) is stored in the Mesh object. A series of threaded loops are used to run parallel calculations on the objects created and stored within the warehouses.
MOOSE's pluggable systems are documented on the mooseframework.org wiki. Each of these systems has set of defined polymorphic interfaces and are designed to accomplish a specific task within the simulation. The design of these systems is fluid and is managed through agile methods and ticket request system on the Github.org website.
Data Design and Control
At a high level, the system is designed to process HIT input files to construct several objects that will constitute an FE simulation. Some of the objects in the simulation may in turn load other file-based resources to complete the simulation. Examples include meshes or data files. The system will then assemble systems of equations and solve them using the libraries of the Code Platform. The system can then output the solution in one or more supported output formats commonly used for visualization.
Human-Machine Interface Design
MOOSE is a command-line driven program. All interaction with MOOSE and MOOSE-based codes is ultimately done through the command line. This is typical for HPC applications that use the MPI interface for running on super computing clusters. Optional GUIs may be used to assist in creating input files and launching executables on the command line.
System Design Interface
All external system interaction is performed either through file I/O or through local API calls. Neither the framework, nor the modules are designed to interact with any external system directly through remote procedure calls. Any code to code coupling performed using the framework are done directly through API calls either in a static binary or after loading shared libraries.
Security Structure
The framework does not require any elevated privileges to operate and does not run any stateful services, daemons or other network programs. Distributed runs rely on the MPI library.
Requirements Cross-Reference
- tensor_mechanics: Generalized Plane Strain Action
- 2.1.1The system shall support generalized plane strain with incremental strain for 1D meshes using the TensorMechanics/Master Action.
Specification(s): axisymmetric_gps_incremental
Design: Generalized Plane Strain Action
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.2The system shall support generalized plane strain with small strain for 1D meshes using the TensorMechanics/Master Action.
Specification(s): axisymmetric_gps_small
Design: Generalized Plane Strain Action
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.3The system shall support generalized plane strain with finite strain for 1D meshes using the TensorMechanics/Master Action.
Specification(s): axisymmetric_gps_finite
Design: Generalized Plane Strain Action
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.7The system shall support setting up a generalized plane strain problem through an action
Specification(s): generalized_plane_strain_squares
Design: Generalized Plane Strain Action
Issue(s): #7840
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.8The system shall support setting the out-of-plane pressure using a function for generalized plane strain problems
Specification(s): out_of_plane_pressure_function
Design: Generalized Plane Strain Action
Issue(s): #7840
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.9The system shall support setting the out-of-plane pressure using a material property for generalized plane strain problems
Specification(s): out_of_plane_pressure_material
Design: Generalized Plane Strain Action
Issue(s): #17250
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.10The system shall support listing all of the out-of-plane strain variables in the strain calculator
Specification(s): generalized_plane_strain_scalar_vector
Design: Generalized Plane Strain Action
Issue(s): #7840
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric 1D Incremental Strain
- 2.1.4The ComputeAxisymmetric1DIncrementalStrain class shall compute the elastic stress for a 1D axisymmetric small incremental strain formulation under a combination of applied tensile displacement and thermal expansion loading using the TensorMechanics/Master Action.
Specification(s): axisymmetric_plane_strain_incremental
Design: Compute Axisymmetric 1D Incremental Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.7The ComputeAxisymmetric1DIncrementalStrain class shall, under generalized plane strain conditions, compute the elastic stress for a 1D axisymmetric small incremental strain formulation under a combination of applied tensile displacement and thermal expansion loading.
Specification(s): axisymm_gps_incremental
Design: Compute Axisymmetric 1D Incremental Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric 1D Small Strain
- 2.1.5The ComputeAxisymmetric1DSmallStrain class shall compute the elastic stress for a 1D axisymmetric small total strain formulation under a combination of applied tensile displacement and thermal expansion loading using the TensorMechanics/Master Action.
Specification(s): axisymmetric_plane_strain_small
Design: Compute Axisymmetric 1D Small Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.8The ComputeAxisymmetric1DSmallStrain class shall, under generalized plane strain conditions, compute the elastic stress for a 1D axisymmetric small total strain formulation under a combination of applied tensile displacement and thermal expansion loading.
Specification(s): axisymm_gps_small
Design: Compute Axisymmetric 1D Small Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric 1D Finite Strain
- 2.1.6The ComputeAxisymmetric1DFiniteStrain class shall compute the elastic stress for a 1D axisymmetric incremental finite strain formulation under a combination of applied tensile displacement and thermal expansion loading using the TensorMechanics/Master Action.
Specification(s): axisymmetric_plane_strain_finite
Design: Compute Axisymmetric 1D Finite Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.9The ComputeAxisymmetric1DFiniteStrain class shall, under generalized plane strain conditions, compute the elastic stress for a 1D axisymmetric incremental finite strain formulation under a combination of applied tensile displacement and thermal expansion loading.
Specification(s): axisymm_gps_finite
Design: Compute Axisymmetric 1D Finite Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.1.10The StressDivergenceRZTensors class shall generate an error if used with Problem/rz_coord_axis set to anything other than Y
Specification(s): 1d_finite_rz_coord_axis_error
Design: Compute Axisymmetric 1D Finite Strain
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Compute R-Spherical Incremental Strain
- 2.2.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.21We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rspherical_incremental_small_elastic-noad
Design: Compute R-Spherical Incremental Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Finite Strain Elastic Stress
- 2.2.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.1The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes.
Specification(s): elastic_patch
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.2The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation.
Specification(s): elastic_patch_incremental_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.4The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation with no displaced mesh created.
Specification(s): elastic_patch_incremental_small_no_disp_mesh
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.5The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when using volumetric locking correction.
Specification(s): elastic_patch_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.6The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.7The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when employing volumetric locking correction and running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.8The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular 20-noded quadratic hexes.
Specification(s): elastic_patch_quadratic
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #620
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.1The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): new
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.2The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): new_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.5The ComputeFiniteStrainElasticStress class shall compute the elastic stress based on a finite strain fomulation and then follow the stress as the mesh is rotated 90 degrees in accordance with Kamojjala et al.(2015) using the TensorMechanicsMaster action.
Specification(s): rotation_new
Design: Compute Finite Strain Elastic StressTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.6The ComputeFiniteStrainElasticStress class shall compute the elastic stress based on a finite strain fomulation and then follow the stress as the mesh is rotated 90 degrees in accordance with Kamojjala et al.(2015) using the volumetric locking correction b-bar formulation.
Specification(s): rotation_new_Bbar
Design: Compute Finite Strain Elastic StressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.7The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): eigen_sol
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.8The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): eigen_sol_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.9The ComputeLinearElasticStress class shall generate an error if a user attempts to run a problem using ComputeLinearElasticStress with a finite strain formulation.
Specification(s): stress_errorcheck
Design: Compute Finite Strain Elastic StressCompute Linear Elastic StressTensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.48.1Finite strain methods in Tensor Mechanics should be able to adequately simulate a complex strain state simulation in 3D using an orhotropic filling with isotropic properties.
Specification(s): 3d_isotropic
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.48.2Finite strain methods in Tensor Mechanics should be able to adequately simulate a complex strain state simulation in 3D using an orhotropic filling with isotropic properties.
Specification(s): 3d_orthotropic_isotropic
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.48.3Finite strain methods in Tensor Mechanics should be able to rotate an orthotropic beam-like element 90 degrees and retrieve the proper displacement after being solicited by a pressure boundary condition.
Specification(s): 3d_bar_orthotropic_90deg_rotation
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.48.4Finite strain methods in Tensor Mechanics should be able to rotate an orthotropic beam-like element 90 degrees and retrieve the proper displacement after being solicited by a pressure boundary condition when automatic differentiation is used.
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.48.5Finite strain methods in Tensor Mechanics should be able to rotate an orthotropic beam-like element 360 degrees and retrieve the proper displacement after being solicited by a pressure boundary condition.
Specification(s): 3d_bar_orthotropic_full_rotation
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.48.6Finite strain methods in Tensor Mechanics should be able to rotate an orthotropic beam-like element 360 degrees and retrieve the proper displacement after being solicited by a pressure boundary condition when automatic differentiation is used.
Specification(s): 3d_bar_orthotropic_full_rotation_ad
Design: Compute Finite Strain Elastic Stress
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Tensor Mechanics Master Action System
- 2.2.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.8The TensorMechanics MasterAction shall calculate the elastic stress and strain response for a 3D pressurized hollow cylinder with a large strain incremental strain formulation.
Specification(s): 3D_RZ_finitestrain
Design: Tensor Mechanics Master Action System
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.1The TensorMechanics MasterAction shall support changing the base name when creating a consistent strain calculator material and stress divergence kernel and shall generate different sets of outputs for different mesh subblocks with the appropriate base name.
Specification(s): two_block_base_name
Design: Tensor Mechanics Master Action System
Issue(s): #13860
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.2The TensorMechanics MasterAction shall create a consistent strain calculator material and stress divergence kernel and shall generate different sets of outputs for different mesh subblocks.
Specification(s): two_block_new
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.3The TensorMechanics MasterAction shall create different sets of consistent strain calculator material and stress divergence kernel pairs for different mesh subblocks requesting different strain formulations.
Specification(s): two_block
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.4The TensorMechanics MasterAction shall error if an input file does not specify block restrictions for the MasterAction in input files with more than one instance of the MasterAction block.
Specification(s): two_block.error_unrestricted
Design: Tensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.7.5The TensorMechanics MasterAction shall error if an input file specifies overlapping block restrictions for the MasterAction in input files with more than one instance of the MasterAction block.
Specification(s): two_block.error_overlapping
Design: Tensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.7.6The TensorMechanics MasterAction shall warn if global Master action parameters are supplied but no Master action subblock have been added.
Specification(s): no_block
Design: Tensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.7.7The TensorMechanics MasterAction shall create different sets of consistent strain calculator material and stress divergence kernel pairs for different mesh subblocks using different coordinate systems.
Specification(s): two_coord
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.8The TensorMechanics MasterAction shall error if an input file assigns the same TensorMechanics MasterAction block to mesh blocks with different coordinate systems.
Specification(s): two_coord.error_different_coords
Design: Tensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.7.9The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): action_eigenstrain
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.10The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): action_multi_eigenstrain
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.11The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): action_multi_eigenstrain_same_conditions
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.12The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): ad_converter_action_multi_eigenstrain
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.13The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): reduced_eigenstrain_action
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.14The TensorMechanics MasterAction shall extract eigenstrain names from material classes and correctly output these names to the console.
Specification(s): composite_eigenstrain
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.15The TensorMechanics MasterAction shall determine the necessary orders and families to apply to material outputs.
Specification(s): material_output_order.empty
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.16The TensorMechanics MasterAction shall apply a single given output order to all output variables.
Specification(s): material_output_order.single
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.17The TensorMechanics MasterAction shall apply a single given output family to all output variables.
Specification(s): material_output_order.family_single
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.7.18The TensorMechanics MasterAction shall error if an the material outputs and or families do not match the number of material outputs.
Specification(s): material_output_order.error1
Design: Tensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.7.19The TensorMechanics MasterAction shall determine the necessary orders and families to apply to material outputs.
Specification(s): material_output_first_lagrange_manual
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.20The TensorMechanics MasterAction shall determine the necessary orders and families to apply to material outputs.
Specification(s): material_output_first_lagrange_automatic
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.7.21The TensorMechanics MasterAction shall permit scalar quantity output from arbitrary tensors.
Specification(s): custom_output
Design: Tensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.4The Jacobian for the AD small strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.5The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere_incremental-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.6The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): finiteStrain_1DSphere_hollow-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.10.1The TensorMechanics MasterAction shall create a consistent strain calculator material and stress divergence kernel and shall generate different sets of outputs for different mesh subblocks.
Specification(s): two_block_new
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.10.2The TensorMechanics MasterAction shall create different sets of consistent strain calculator material and stress divergence kernel pairs for different mesh subblocks requesting different strain formulations.
Specification(s): two_block
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.10.3The TensorMechanics MasterAction shall error if an input file does not specify block restrictions for the MasterAction in input files with more than one instance of the MasterAction block.
Specification(s): error_unrestricted
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.10.4The TensorMechanics MasterAction shall error if an input file specifies overlapping block restrictions for the MasterAction in input files with more than one instance of the MasterAction block.
Specification(s): error_overlapping
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.10.5The TensorMechanics MasterAction shall create different sets of consistent strain calculator material and stress divergence kernel pairs for different mesh subblocks using different coordinate systems.
Specification(s): two_coord
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.10.6The TensorMechanics MasterAction shall error if an input file assigns the same TensorMechanics MasterAction block to mesh blocks with different coordinate systems.
Specification(s): error_coord
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.10.7The Jacobian for the automatic differentiation in the two_block testproblem shall be perfect
Specification(s): two_block-jac
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.10.8The Jacobian for the automatic differentiation in the two_block testproblem shall be perfect (non action test case)
Specification(s): two_block_no_action-jac
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.10.9The Jacobian for the automatic differentiation in the two_block_new problem shall be perfect
Specification(s): two_block_new-jac
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.10.10The Jacobian for the automatic differentiation two_coord problem shall be perfect
Specification(s): two_coord-jac
Design: Tensor Mechanics Master Action System
Issue(s): #7555
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.25.1The mechanics system shall be capable of accurately computing the elastic response of an anisotropic elastic material where 6 components of a symmetric elasticity tensor are output on an irregular patch of elements with total small strain assumptions
Specification(s): test
Design: Compute Linear Elastic StressCompute Small StrainTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.1The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): new
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.5The ComputeFiniteStrainElasticStress class shall compute the elastic stress based on a finite strain fomulation and then follow the stress as the mesh is rotated 90 degrees in accordance with Kamojjala et al.(2015) using the TensorMechanicsMaster action.
Specification(s): rotation_new
Design: Compute Finite Strain Elastic StressTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.7The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): eigen_sol
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.9The ComputeLinearElasticStress class shall generate an error if a user attempts to run a problem using ComputeLinearElasticStress with a finite strain formulation.
Specification(s): stress_errorcheck
Design: Compute Finite Strain Elastic StressCompute Linear Elastic StressTensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Rank Two Spherical Component
- 2.2.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.2.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Incremental StrainCompute Finite Strain Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.4The Jacobian for the AD small strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.5The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere_incremental-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.6The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): finiteStrain_1DSphere_hollow-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute Plane Small Strain
- 2.3.1The tensor mechanics strain calculators shall solve plane strain in the x-y plane for small strain
Specification(s): plane_strain_xy_small
Design: Compute Plane Small Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.4The tensor mechanics strain calculators shall solve plane strain in the x-z plane for small strain
Specification(s): plane_strain_xz_small
Design: Compute Plane Small Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.7The tensor mechanics strain calculators shall solve plane strain in the y-z plane for small strain
Specification(s): plane_strain_yz_small
Design: Compute Plane Small Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.1The ComputePlaneSmallStrain class shall compute the elastic stress and strain for a planar square geometry under tension using a total small plane strain formulation.
Specification(s): plane_strain
Design: Compute Plane Small Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.2The ComputePlaneSmallStrain class shall compute the same result for elastic strain and stress when using the B-bar volumentric locking correction as computed without the volumetric locking correction for a planar geometry using a total small plane strain formulation.
Specification(s): plane_strain_Bbar
Design: Compute Plane Small StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.1The system shall support a traditional plane strain mechanics solution
Specification(s): plane_strain
Design: Compute Plane Small Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.2The system shall support a traditional plane strain mechanics solution where the out-of-plane strain is prescribed
Specification(s): plane_strain_prescribed
Design: Compute Plane Small Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.3The system shall support a generalized plane strain mechanics solution
Specification(s): generalized_plane_strain_small
Design: Compute Plane Small Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.4The system shall support a generalized plane strain mechanics solution using the reference residual approach to check solution convergence of the field and scalar variables
Specification(s): generalized_plane_strain_ref_resid
Design: Compute Plane Small Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Plane Incremental Strain
- 2.3.2The tensor mechanics strain calculators shall solve plane strain in the x-y plane for incremental strain
Specification(s): plane_strain_xy_incremental
Design: Compute Plane Incremental Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.5The tensor mechanics strain calculators shall solve plane strain in the x-z plane for incremental strain
Specification(s): plane_strain_xz_incremental
Design: Compute Plane Incremental Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.8The tensor mechanics strain calculators shall solve plane strain in the y-z plane for incremental strain
Specification(s): plane_strain_yz_incremental
Design: Compute Plane Incremental Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.5The system shall support a generalized plane strain mechanics solution with incremental strain
Specification(s): generalized_plane_strain_increment
Design: Compute Plane Incremental Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Plane Finite Strain
- 2.3.3The tensor mechanics strain calculators shall solve plane strain in the x-y plane for finite strain
Specification(s): plane_strain_xy_finite
Design: Compute Plane Finite Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.6The tensor mechanics strain calculators shall solve plane strain in the x-z plane for finite strain
Specification(s): plane_strain_xz_finite
Design: Compute Plane Finite Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.9The tensor mechanics strain calculators shall solve plane strain in the y-z plane for finite strain
Specification(s): plane_strain_yz_finite
Design: Compute Plane Finite Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.3The ComputePlaneFiniteStrain class shall compute the elastic stress and strain for a planar square geometry under tension using a finite incremental plane strain formulation.
Specification(s): finite_planestrain
Design: Compute Plane Finite Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.4The ComputePlaneFiniteStrain class shall compute the same result for elastic strain and stress when using the B-bar volumentric locking correction as computed without the volumetric locking correction for a planar geometry using a finite incremental plane strain formulation.
Specification(s): finite_planestrain_Bbar
Design: Compute Plane Finite StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.51.6The system shall support a generalized plane strain mechanics solution with finite strain
Specification(s): generalized_plane_strain_finite
Design: Compute Plane Finite Strain
Issue(s): #5042
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Generalized Plane Strain
- 2.3.10The tensor mechanics strain calculators shall solve generalized plane strain in the x-y plane for small strain
Specification(s): gps_xy_small
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.11The tensor mechanics strain calculators shall solve generalized plane strain in the x-y plane for incremental strain
Specification(s): gps_xy_incremental
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.12The tensor mechanics strain calculators shall solve generalized plane strain in the x-y plane for finite strain
Specification(s): gps_xy_finite
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.13The tensor mechanics strain calculators shall solve generalized plane strain in the x-z plane for small strain
Specification(s): gps_xz_small
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.14The tensor mechanics strain calculators shall solve generalized plane strain in the x-z plane for incremental strain
Specification(s): gps_xz_incremental
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.15The tensor mechanics strain calculators shall solve generalized plane strain in the x-z plane for finite strain
Specification(s): gps_xz_finite
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.16The tensor mechanics strain calculators shall solve generalized plane strain in the y-z plane for small strain
Specification(s): gps_yz_small
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.17The tensor mechanics strain calculators shall solve generalized plane strain in the y-z plane for incremental strain
Specification(s): gps_yz_incremental
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.3.18The tensor mechanics strain calculators shall solve generalized plane strain in the y-z plane for finite strain
Specification(s): gps_yz_finite
Design: Generalized Plane Strain
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Stress Divergence Tensors
- 2.3.19The Jacobian for plane strain in the x-y plane shall be correct
Specification(s): planestrain_jacobian_xy
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.3.20The Jacobian for plane strain in the x-z plane shall be correct
Specification(s): planestrain_jacobian_xz
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.3.21The Jacobian for plane strain in the y-z plane shall be correct
Specification(s): planestrain_jacobian_yz
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.3.22The Jacobian for generalized plane strain in the x-y plane shall be correct
Specification(s): gps_jacobian_xy
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.3.23The Jacobian for generalized plane strain in the x-z plane shall be correct
Specification(s): gps_jacobian_xz
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.3.24The Jacobian for generalized plane strain in the y-z plane shall be correct
Specification(s): gps_jacobian_yz
Design: Stress Divergence Tensors
Issue(s): #11257
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Volumetric Locking Correction
- 2.4.2The ComputePlaneSmallStrain class shall compute the same result for elastic strain and stress when using the B-bar volumentric locking correction as computed without the volumetric locking correction for a planar geometry using a total small plane strain formulation.
Specification(s): plane_strain_Bbar
Design: Compute Plane Small StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.4The ComputePlaneFiniteStrain class shall compute the same result for elastic strain and stress when using the B-bar volumentric locking correction as computed without the volumetric locking correction for a planar geometry using a finite incremental plane strain formulation.
Specification(s): finite_planestrain_Bbar
Design: Compute Plane Finite StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.10The ComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction.
Specification(s): axisym_resid_Bbar
Design: Compute Axisymmetric RZ Finite StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.11The volumetric locking correction option in ComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation.
Specification(s): axisymmetric_vlc_centerline_pp
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.9.5The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction.
Specification(s): axisym_resid_Bbar
Design: ADComputeAxisymmetricRZFiniteStrainVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.6The volumetric locking correction option in ADComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation.
Specification(s): axisymmetric_vlc_centerline_pp
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.9.11The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction and shall produce perfect jacobians.
Specification(s): axisym_resid_Bbar-jac
Design: ADComputeAxisymmetricRZFiniteStrainVolumetric Locking Correction
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.9.12The volumetric locking correction option in ADComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation and shall produce perfect jacobians.
Specification(s): axisymmetric_vlc_centerline_pp-jac
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.44.5The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when using volumetric locking correction.
Specification(s): elastic_patch_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.7The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when employing volumetric locking correction and running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.2The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): new_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.3The ComputeMultiPlasticityStress class shall, when supplied with no plastic models, reduce to and produce the solely elastic stress solution for a finite strain fomulation, using the TensorMechanicsMaster action.
Specification(s): fake_plastic
Design: ComputeMultiPlasticityStressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.4The ComputeMultiPlasticityStress class shall, when supplied with no plastic models, reduce to and produce the solely elastic stress solution for a finite strain fomulation, using the volumetric locking correction b-bar formulation.
Specification(s): fake_plastic_Bbar
Design: ComputeMultiPlasticityStressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.6The ComputeFiniteStrainElasticStress class shall compute the elastic stress based on a finite strain fomulation and then follow the stress as the mesh is rotated 90 degrees in accordance with Kamojjala et al.(2015) using the volumetric locking correction b-bar formulation.
Specification(s): rotation_new_Bbar
Design: Compute Finite Strain Elastic StressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.8The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): eigen_sol_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.102.4The mechanics system shall correctly compute the jacobian for 3D problems using small strain and volumetric locking correction.
Specification(s): smallstrain_3D_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.5The mechanics system shall correctly compute the jacobian for 3D problems using incremental small strain and volumetric locking correction.
Specification(s): incrementalstrain_3D_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.6The mechanics system shall correctly compute the jacobian for 3D problems using finite strain and volumetric locking correction.
Specification(s): finitestrain_3D_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.10The mechanics system shall correctly compute the jacobian for RZ problems using small strain and volumetric locking correction.
Specification(s): smallstrain_RZ_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.11The mechanics system shall correctly compute the jacobian for RZ problems using incremental small strain and volumetric locking correction.
Specification(s): incrementalstrain_RZ_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.12The mechanics system shall correctly compute the jacobian for RZ problems using finite strain and volumetric locking correction.
Specification(s): finitestrain_RZ_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.16The mechanics system shall correctly compute the jacobian for planestrain problems using small strain and volumetric locking correction.
Specification(s): smallplanestrain_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.17The mechanics system shall correctly compute the jacobian for planestrain problems using incremental small strain and volumetric locking correction.
Specification(s): incrementalplanestrain_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.18The mechanics system shall correctly compute the jacobian for planestrain problems using finite strain and volumetric locking correction.
Specification(s): finiteplanestrain_Bbar
Design: Volumetric Locking Correction
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.111.2The ComputeDeformGradBasedStress class shall correctly compute the stress from lagrangian strain when volumetric locking correction is used.
Specification(s): elastic_Bbar
Design: ComputeDeformGradBasedStressVolumetric Locking Correction
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.111.4The ComputeVolumeDeformGrad and the VolumeDeformGradCorrectedStress classes shall correctly compute the volumetric deformation gradient, total deformation gradient and transform the stress from previous configuration to the current configuration when volumetric locking correction is used.
Specification(s): interface_Bbar
Design: ComputeVolumetricDeformGradVolumeDeformGradCorrectedStressVolumetric Locking Correction
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.113.1The mechanics system shall correctly model the deformation of a 2D membrane with nearly incompressible material when volumetric locking correction is set to true.
Specification(s): vol_lock_2D
Design: Volumetric Locking Correction
Issue(s): #11220
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.113.2The mechanics system shall correctly model the locking behavior of a 2D membrane with nearly incompressible material when volumetric locking correction is set to false.
Specification(s): no_vol_lock_2D
Design: Volumetric Locking Correction
Issue(s): #11220
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric RZ Small Strain
- 2.4.5The ComputeAxisymmetricRZSmallStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small total axisymmetric strain formulation.
Specification(s): axisym_smallstrain
Design: Compute Axisymmetric RZ Small Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.15We shall be able to reproduce small strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rz_small_elastic-noad
Design: Compute Axisymmetric RZ Small Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric RZ Incremental Strain
- 2.4.6The ComputeAxisymmetricRZIncrementalStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation.
Specification(s): axisym_incremental_strain
Design: Compute Axisymmetric RZ Incremental Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.12We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rz_incremental_small_elastic-noad
Design: Compute Axisymmetric RZ Incremental Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Axisymmetric RZ Finite Strain
- 2.4.7The ComputeAxisymmetricRZFiniteStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation.
Specification(s): axisym_finitestrain
Design: Compute Axisymmetric RZ Finite Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.9The ComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension.
Specification(s): axisym_resid
Design: Compute Axisymmetric RZ Finite Strain
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.4.10The ComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction.
Specification(s): axisym_resid_Bbar
Design: Compute Axisymmetric RZ Finite StrainVolumetric Locking Correction
Issue(s): #5142
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.9We shall be able to reproduce finite strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rz_finite_elastic-noad
Design: Compute Axisymmetric RZ Finite Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: AxisymmetricCenterlineAverageValue
- 2.4.11The volumetric locking correction option in ComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation.
Specification(s): axisymmetric_vlc_centerline_pp
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.9.6The volumetric locking correction option in ADComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation.
Specification(s): axisymmetric_vlc_centerline_pp
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.9.12The volumetric locking correction option in ADComputeAxisymmetricRZFiniteStrain shall reinit material properties without inverting a zero tensor when called from a side postprocessor applied to the axis of rotation in an axisymmetric simulation and shall produce perfect jacobians.
Specification(s): axisymmetric_vlc_centerline_pp-jac
Design: Volumetric Locking CorrectionAxisymmetricCenterlineAverageValue
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Legacy Kernel-Only Tensor Mechanics Action
- 2.5.1The Tensor Mechanics system shall support transformations of a rank two tensor into cylindircal coordinates.
Specification(s): test
Design: Legacy Kernel-Only Tensor Mechanics ActionCylindrical Rank Two Aux
Issue(s): #716
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.5.2The Tensor Mechanics system including volumetric locking correction shall support transformations of a rank two tensor into cylindircal coordinates.
Specification(s): test_Bbar
Design: Legacy Kernel-Only Tensor Mechanics ActionCylindrical Rank Two Aux
Issue(s): #716
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Cylindrical Rank Two Aux
- 2.5.1The Tensor Mechanics system shall support transformations of a rank two tensor into cylindircal coordinates.
Specification(s): test
Design: Legacy Kernel-Only Tensor Mechanics ActionCylindrical Rank Two Aux
Issue(s): #716
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.5.2The Tensor Mechanics system including volumetric locking correction shall support transformations of a rank two tensor into cylindircal coordinates.
Specification(s): test_Bbar
Design: Legacy Kernel-Only Tensor Mechanics ActionCylindrical Rank Two Aux
Issue(s): #716
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: AccumulateAux
- 2.6.1The system shall provide an aux kernel that accumulates the values of a given variable.
Specification(s): accumulate_aux
Design: AccumulateAux
Issue(s): #7091
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute R-Spherical Small Strain
- 2.8.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.4The Jacobian for the AD small strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.5The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere_incremental-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.6The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): finiteStrain_1DSphere_hollow-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.14.24We shall be able to reproduce small strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rspherical_small_elastic-noad
Design: Compute R-Spherical Small Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Linear Elastic Stress
- 2.8.1The ComputeRSphericalSmallStrain class, called through the TensorMechanicsMaster action, shall compute the total linearized solution for the displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with total small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.2The ComputeRSphericalIncrementalStrain class, called through the TensorMechanicsMaster action, shall find the linearized incremental strain displacement of a solid isotropic elastic sphere with a pressure applied to the outer surface using a 1D spherical symmetric formulation with incremental small strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial and hoop stress.
Specification(s): smallStrain_1DSphere_incremental
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.3The ComputeRSphericalFiniteStrain class, called through the TensorMechanicsMaster action, shall find the finite incremental strain displacement of a thick walled hollow isotropic elastic sphere under an applied load using a 1D spherical symmetric fomulation with incremental finite strain assumptions. The RankTwoSphericalComponent class, called through the TensorMechanicsMaster action, shall output the spherical radial stress.
Specification(s): finiteStrain_1DSphere_hollow
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.8.4The Jacobian for the AD small strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.5The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): smallStrain_1DSphere_incremental-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.8.6The Jacobian for the AD small incremental strain elasticity problem with Pressure BC in spherical coordinates shall be perfect
Specification(s): finiteStrain_1DSphere_hollow-jac
Design: Compute R-Spherical Small StrainCompute Linear Elastic StressTensor Mechanics Master Action SystemRank Two Spherical Component
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.25.1The mechanics system shall be capable of accurately computing the elastic response of an anisotropic elastic material where 6 components of a symmetric elasticity tensor are output on an irregular patch of elements with total small strain assumptions
Specification(s): test
Design: Compute Linear Elastic StressCompute Small StrainTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.3The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an total small-strain calculation.
Specification(s): elastic_patch_total_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Small StrainCompute Linear Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.9The ComputeLinearElasticStress class shall generate an error if a user attempts to run a problem using ComputeLinearElasticStress with a finite strain formulation.
Specification(s): stress_errorcheck
Design: Compute Finite Strain Elastic StressCompute Linear Elastic StressTensor Mechanics Master Action System
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: ADComputeAxisymmetricRZSmallStrain
- 2.9.1The ADComputeAxisymmetricRZSmallStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small total axisymmetric strain formulation.
Specification(s): axisym_smallstrain
Design: ADComputeAxisymmetricRZSmallStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.7The ADComputeAxisymmetricRZSmallStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small total axisymmetric strain formulation and shall produce perfect jacobians.
Specification(s): axisym_smallstrain-jac
Design: ADComputeAxisymmetricRZSmallStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.14.16We shall be able to reproduce small strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation.
Specification(s): rz_small_elastic
Design: ADComputeAxisymmetricRZSmallStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.17The Jacobian for the AD small strain elasticity problem in cylindrical coordinates shall be perfect
Specification(s): rz_small_elastic-jac
Design: ADComputeAxisymmetricRZSmallStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADComputeAxisymmetricRZIncrementalStrain
- 2.9.2The ADComputeAxisymmetricRZIncrementalStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation.
Specification(s): axisym_incremental_strain
Design: ADComputeAxisymmetricRZIncrementalStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.8The ADComputeAxisymmetricRZIncrementalStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation and shall produce perfect jacobians.
Specification(s): axisym_incremental_strain-jac
Design: ADComputeAxisymmetricRZIncrementalStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.14.13We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation.
Specification(s): rz_incremental_small_elastic
Design: ADComputeAxisymmetricRZIncrementalStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.14The Jacobian for the AD incremental small strain elasticity problem in cylindrical coordinates shall be perfect
Specification(s): rz_incremental_small_elastic-jac
Design: ADComputeAxisymmetricRZIncrementalStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADComputeAxisymmetricRZFiniteStrain
- 2.9.3The ADComputeAxisymmetricRZFiniteStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation.
Specification(s): axisym_finitestrain
Design: ADComputeAxisymmetricRZFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.4The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension.
Specification(s): axisym_resid
Design: ADComputeAxisymmetricRZFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.5The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction.
Specification(s): axisym_resid_Bbar
Design: ADComputeAxisymmetricRZFiniteStrainVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.9.9The ADComputeAxisymmetricRZFiniteStrain class shall compute the mechanical response for a pressurized hollow cylinder with a small incremental axisymmetric strain formulation and shall produce perfect jacobians.
Specification(s): axisym_finitestrain-jac
Design: ADComputeAxisymmetricRZFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.9.10The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension and shall produce perfect jacobians.
Specification(s): axisym_resid-jac
Design: ADComputeAxisymmetricRZFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.9.11The ADComputeAxisymmetricRZFiniteStrain class shall compute the reaction forces on the top surface of a cylinder which is loaded axially in tension when using the B-bar volumetric locking correction and shall produce perfect jacobians.
Specification(s): axisym_resid_Bbar-jac
Design: ADComputeAxisymmetricRZFiniteStrainVolumetric Locking Correction
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.14.10We shall be able to reproduce finite strain elasticity results of the hand-coded simulation in cylindrical coordinates using automatic differentiation.
Specification(s): rz_finite_elastic
Design: ADComputeAxisymmetricRZFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.11The Jacobian for the AD finite strain elasticity problem in cylindrical coordinates shall be perfect
Specification(s): rz_finite_elastic-jac
Design: ADComputeAxisymmetricRZFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Hill Creep Stress Update
- 2.11.1The system shall avoid regression on material time step and combined anisotropic creep computations
Specification(s): anis_mech_hill_tensor_creep_small_tiny_step_ts_limit_test
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.11.2The system shall be capable of reproducing verification results of creep strain ratios along the X direction.
Specification(s): ad_aniso_creep_x_3d
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.3The system shall be capable of reproducing verification results of creep strain ratios along the Y direction.
Specification(s): ad_aniso_creep_y_3d
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.4The system shall be capable of reproducing verification results of creep strain ratios along the Z direction.
Specification(s): ad_aniso_creep_z_3d
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.5The system shall be capable of reproducing isotropic creep with the right anisotropic creep parameters: Baseline
Specification(s): ad_aniso_iso_iso
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.6The system shall provide a perfect Jacobian while calculating large deformation creep.
Specification(s): jac
Design: Hill Creep Stress Update
Issue(s): #17456
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.11.7The system shall be capable of reproducing isotropic creep with the right anisotropic creep parameters.
Specification(s): ad_aniso_iso_aniso
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.8The system shall be capable of enforcing a time step such that the creep rate integration error is controled by the user with the aid of a soft terminator.
Specification(s): ad_aniso_creep_integration_error
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.9The system shall be capable of running Hill materials with constant coefficients and coefficients that are function of temperature to capture material texture. This test performs a reference run with constant coefficients
Specification(s): ad_aniso_creep_temperature_coefficients
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.11.10The system shall be capable of running Hill materials with constant coefficients and coefficients that are function of temperature to capture material texture. This test performs a run using a constant temperature function.
Specification(s): ad_aniso_creep_temperature_coefficients_function
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.11.11The system shall be capable of running anisotropic Hill creep with temperature-dependent Hill coefficients and generating correct output.
Specification(s): ad_aniso_creep_temperature_coefficients_function_variation
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.11.12The system shall be capable of using large deformation rotation to update the orientation of Hill parameters even when there is no rigid body rotation. This test also serves as a reference to verify the updates to the Hill parameters when there is significant rigid body motion
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad_creep_z_no_rotation
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.13The system shall be capable of using large deformation rotation to update the orientation of Hill parameters when there is 90-degree rigid body orientation change about the Z axis. The creep strains have to be very similar to the output when there is no rigid body motion (Note: The mere constraints enforcing rigid body rotation induce numerical errors). In this case using Hill constants.
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad_creep_z
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.14The system shall be capable of using large deformation rotation to update the orientation of Hill parameters even when there is no rigid body rotation. This test also serves as a reference to verify the updates to the Hill parameters when there is significant rigid body motion
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad_creep_x_no_rotation
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.15The system shall be capable of not using large deformation rotation to define Hill anisotropic parameters.
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad_creep_x_no_rotation_no_transformation
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.11.16The system shall be capable of using large deformation rotation to update the orientation of Hill parameters when there is 90-degree rigid body orientation change about the X axis. The creep strains have to be very similar to the output when there is no rigid body motion (Note: The mere constraints enforcing rigid body rotation induce numerical errors). In this case using Hill constants.
Specification(s): 3d_bar_orthotropic_90deg_rotation_ad_creep_x
Design: Hill Creep Stress Update
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: TensorMechanicsPlasticOrthotropic
- 2.12.1Anisotropic plasticity and anisotropic elastoplasticity must give almost identical results if elastic behavior is isotropic – plastic anisotropy
Specification(s): ad_aniso_plasticity_x_one_ref
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.12.2Anisotropic plasticity and anisotropic elastoplasticity must give almost identical results if elastic behavior is isotropic – elastoplastic anisotropy
Specification(s): ad_aniso_plasticity_x_one
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.12.3The system shall be able to solve anisotropic plasticity and anisotropic elastoplasticity problems with elastoplastic anisotropy
Specification(s): ad_aniso_plasticity_x_one_light
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.13.1Anisotropic plasticity must yield same results as finite strain elasticity if yield condition is never met
Specification(s): anis_plasticity_test
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.13.2Anisotropic plasticity must yield same results as finite strain elasticity if yield condition is never met –elasticity
Specification(s): anis_elasticity_test
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.13.3Anisotropic plasticity with isotropic elasticity must reproduce simplified verification problem along x axis
Specification(s): ad_aniso_plasticity_x
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.13.4Anisotropic plasticity with hill tensor rotation must produce simplified verification problem along x axis
Specification(s): ad_aniso_plasticity_x_rotate
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.13.5Anisotropic plasticity with isotropic elasticity must reproduce simplified verification problem along y axis
Specification(s): ad_aniso_plasticity_y
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #16016
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.81.1The system shall be capable of simulating materials that exhibit orthotropic plasticity with constant hardening and linear strain applied in the x and y directions.
Specification(s): test
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #3832
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.81.2The system shall be capable of simulating materials that exhibit orthotropic plasticity with power rule hardening and linear strain applied in the x direction.
Specification(s): power_rule
Design: TensorMechanicsPlasticOrthotropic
Issue(s): #3832
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Finite Strain in Cartesian System
- 2.14.1We shall be able to reproduce finite strain elasticity results of the hand-coded simulation using automatic differentiation. (non-AD reference)
Specification(s): finite_elastic-noad
Design: Compute Finite Strain in Cartesian System
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.1The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): new
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.2The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation found with the Taylor expansion from Rashid(1993) on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): new_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.7The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the TensorMechanicsMaster action.
Specification(s): eigen_sol
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.8The ComputeFiniteStrainElasticStress class shall compute the elastic stress for a finite strain formulation using a direct eigensolution to perform the polar decomposition of stretch and rotation on a unit 3D cube in a Cartesian system using the volumetric locking correction b-bar formulation.
Specification(s): eigen_sol_Bbar
Design: Compute Finite Strain Elastic StressCompute Finite Strain in Cartesian SystemVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.49.1Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D
Specification(s): bending
Design: Compute Finite Strain in Cartesian System
Issue(s): #7228
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.49.2Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D using a volumetric locking correction
Specification(s): bending_Bbar
Design: Compute Finite Strain in Cartesian System
Issue(s): #7228
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.49.3Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D
Specification(s): 3d_bar
Design: Compute Finite Strain in Cartesian System
Issue(s): #7228
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.49.4Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D using a volumetric locking correction
Specification(s): 3d_bar_Bbar
Design: Compute Finite Strain in Cartesian System
Issue(s): #7228
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.114.3The system shall cut the timestep through a mooseException when the loading conditions deform the element enough to produce a negative number under a square root term in the Rashid approximation for the rotation tensor
Specification(s): except3
Design: Compute Finite Strain in Cartesian System
Issue(s): #19067
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: ADComputeFiniteStrain
- 2.14.2We shall be able to reproduce finite strain elasticity results of the hand-coded simulation using automatic differentiation.
Specification(s): finite_elastic
Design: ADComputeFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.3The Jacobian for the AD finite strain elasticity problem shall be perfect
Specification(s): finite_elastic-jac
Design: ADComputeFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.15.1Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D using AD and match non-AD methods
Specification(s): bending
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.15.2Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D using a volumetric locking correction using AD and match non-AD methods
Specification(s): bending_Bbar
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.15.3Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D using AD and match non-AD methods
Specification(s): 3d_bar
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.15.4Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D using a volumetric locking correction using AD and match non-AD methods
Specification(s): 3d_bar_Bbar
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.15.5Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D using AD and calculate perfect Jacobians
Specification(s): bending-jac
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.15.6Finite strain methods in Tensor Mechanics should be able to adequately simulate a bar bending simulation in 2D using a volumetric locking correction using AD and calculate perfect Jacobians
Specification(s): bending_Bbar-jac
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.15.7Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D using AD and calculate perfect Jacobians
Specification(s): 3d_bar-jac
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.15.8Finite strain methods in Tensor Mechanics should be able to adequately simulate a tensile test simulation in 3D using a volumetric locking correction using AD and calculate perfect Jacobians
Specification(s): 3d_bar_Bbar-jac
Design: ADComputeFiniteStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute Incremental Small Strain
- 2.14.4We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation using automatic differentiation. (non-AD reference)
Specification(s): incremental_small_elastic-noad
Design: Compute Incremental Small Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.2The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation.
Specification(s): elastic_patch_incremental_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.4The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation with no displaced mesh created.
Specification(s): elastic_patch_incremental_small_no_disp_mesh
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADComputeIncrementalSmallStrain
- 2.14.5We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation using automatic differentiation.
Specification(s): incremental_small_elastic
Design: ADComputeIncrementalSmallStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.6The Jacobian for the AD incremental small strain elasticity problem shall be perfect
Specification(s): incremental_small_elastic-jac
Design: ADComputeIncrementalSmallStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADComputeGreenLagrangeStrain
- 2.14.7The system shall provide an AD enabled Green-Lagrange strain calculator
Specification(s): green-lagrange
Design: ADComputeGreenLagrangeStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.8The Jacobian for the Green-Lagrange strain calculator shall be perfect
Specification(s): green-lagrange-jac
Design: ADComputeGreenLagrangeStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute R-Spherical Finite Strain
- 2.14.18We shall be able to reproduce finite strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation. (non-AD reference)
Specification(s): rspherical_finite_elastic-noad
Design: Compute R-Spherical Finite Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADComputeRSphericalFiniteStrain
- 2.14.19We shall be able to reproduce finite strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation.
Specification(s): rspherical_finite_elastic
Design: ADComputeRSphericalFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.20The Jacobian for the AD finite strain elasticity problem in spherical coordinates shall be perfect
Specification(s): rspherical_finite_elastic-jac
Design: ADComputeRSphericalFiniteStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADComputeRSphericalIncrementalStrain
- 2.14.22We shall be able to reproduce incremental small strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation.
Specification(s): rspherical_incremental_small_elastic
Design: ADComputeRSphericalIncrementalStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.23The Jacobian for the AD incremental small strain elasticity in spherical coordinates problem shall be perfect
Specification(s): rspherical_incremental_small_elastic-jac
Design: ADComputeRSphericalIncrementalStrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute R-Spherical Small Strain
- 2.14.25We shall be able to reproduce small strain elasticity results of the hand-coded simulation in spherical coordinates using automatic differentiation.
Specification(s): rspherical_small_elastic
Design: Compute R-Spherical Small Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.14.26The Jacobian for the AD small strain elasticity problem in spherical coordinates shall be perfect
Specification(s): rspherical_small_elastic-jac
Design: Compute R-Spherical Small Strain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute Isotropic Elasticity Tensor
- 2.16.1The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the lambda and shear modulus for an isotropic material using AD formulations.
Specification(s): lambda_shear
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.16.2The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the Young's modulus and Poisson's ratio for an isotropic material using AD formulations.
Specification(s): youngs_poissons
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.16.3The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from their bulk modulus and shear modulus for an isotropic material using AD formulations.
Specification(s): bulk_shear
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.16.4The ComputeElasticityTensor class shall correctly compute the elasticity tensor for an isotropic axisymmetric problem.
Specification(s): axisymmetric_rz
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.16.5The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the lambda and shear modulus for an isotropic material using AD formulations and produce a perfect Jacobian.
Specification(s): lambda_shear-jac
Design: Compute Isotropic Elasticity Tensor
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.16.6The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the Young's modulus and Poisson's ratio for an isotropic material using AD formulations and produce a perfect Jacobian.
Specification(s): youngs_poissons-jac
Design: Compute Isotropic Elasticity Tensor
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.16.7The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from their bulk modulus and shear modulus for an isotropic material using AD formulations and produce a perfect Jacobian.
Specification(s): bulk_shear-jac
Design: Compute Isotropic Elasticity Tensor
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.16.8The ComputeElasticityTensor class shall correctly compute the elasticity tensor for an isotropic axisymmetric problem and produce a perfect Jacobian.
Specification(s): axisymmetric_rz-jac
Design: Compute Isotropic Elasticity Tensor
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.32.1The system shall generate an error if a number of elastic constants other than two is supplied for an isotropic elasticity tensor
Specification(s): num_constants
Design: Compute Isotropic Elasticity Tensor
Issue(s): #9438
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.32.2The system shall generate an error if a non-positive Youngs modulus is supplied for an isotropic elasticity tensor
Specification(s): youngs_modulus
Design: Compute Isotropic Elasticity Tensor
Issue(s): #9438
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.32.3The system shall generate an error if a non-positive bulk modulus is supplied for an isotropic elasticity tensor
Specification(s): bulk_modulus
Design: Compute Isotropic Elasticity Tensor
Issue(s): #9438
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.32.4The system shall generate an error if a Poissons ratio outside the range from -1 to 0.5 is supplied for an isotropic elasticity tensor
Specification(s): poissons_ratio
Design: Compute Isotropic Elasticity Tensor
Issue(s): #9438
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.32.5The system shall generate an error if a non-positive shear modulus is supplied for an isotropic elasticity tensor
Specification(s): shear_modulus
Design: Compute Isotropic Elasticity Tensor
Issue(s): #9438
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.44.1The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes.
Specification(s): elastic_patch
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.2The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation.
Specification(s): elastic_patch_incremental_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.3The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an total small-strain calculation.
Specification(s): elastic_patch_total_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Small StrainCompute Linear Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.4The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation with no displaced mesh created.
Specification(s): elastic_patch_incremental_small_no_disp_mesh
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.5The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when using volumetric locking correction.
Specification(s): elastic_patch_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.6The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.7The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when employing volumetric locking correction and running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.8The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular 20-noded quadratic hexes.
Specification(s): elastic_patch_quadratic
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #620
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.64.1The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the lambda and shear modulus for an isotropic material.
Specification(s): lambda_shear
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.64.2The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from the Young's modulus and Poisson's ratio for an isotropic material.
Specification(s): youngs_poissons
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.64.3The ComputeIsotropicElasticityTensor class shall correctly compute the elasticity tensor from their bulk modulus and shear modulus for an isotropic material.
Specification(s): bulk_shear
Design: Compute Isotropic Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADComputeLinearElasticStress
- 2.17.1We shall be able to reproduce linear elastic stress results of the hand-coded simulation using automatic differentiation.
Specification(s): linear_elastic_material
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.17.2The Jacobian for the AD linear elastic stress problem shall be perfect
Specification(s): linear_elastic_material-jac
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.17.3We shall be able to introduce extra stresses into the stress calculators using automatic differentiation.
Specification(s): extra_stresses
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.17.4The Jacobian for the AD linear elastic stress problem shall be perfect
Specification(s): extra_stresses-jac
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.17.7We shall be able to reproduce small strain with specified tensors results of the hand-coded simulation using automatic differentiation.
Specification(s): tensor
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.17.8The Jacobian for the AD small strain with specified tensors problem shall be perfect
Specification(s): tensor-jac
Design: ADComputeLinearElasticStress
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute Eigenstrain
- 2.17.5We shall be able to reproduce eigenstrain results of the hand-coded simulation using automatic differentiation.
Specification(s): applied_strain
Design: Compute Eigenstrain
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.17.6The Jacobian for the AD eigenstrain problem shall be perfect
Specification(s): applied_strain-jac
Design: Compute Eigenstrain
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.17.9We shall be able to reproduce thermal eigenstrain results of the hand-coded simulation using automatic differentiation.
Specification(s): thermal_expansion
Design: Compute Eigenstrain
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.17.10The Jacobian for the AD thermal eigenstrain problem shall be perfect
Specification(s): thermal_expansion-jac
Design: Compute Eigenstrain
Issue(s): #13099
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADPowerLawCreepStressUpdate
- 2.18.1The AD multiple inelastic stress calculator shall provide a correct stress for a single power law creep model (reference computation)
Specification(s): powerlaw_ten
Design: ADPowerLawCreepStressUpdate
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.1The ADPowerLawCreepStressUpdate, called through the ADComputeMultipleInelasticStress, shall compute a creep strain based on an extrenal loading.
Specification(s): creep
Design: ADPowerLawCreepStressUpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.2The Jacobian for the AD regular creep problem shall be perfect
Specification(s): creep-jac
Design: ADPowerLawCreepStressUpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ADComputeMultipleInelasticStress
- 2.18.2The AD multiple inelastic stress calculator shall provide a correct stress for a single power law creep model and an additional zero creep power law model
Specification(s): powerlaw_zero
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.18.3The AD multiple inelastic stress calculator shall provide a correct stress for the linear combination of two power law creep models
Specification(s): powerlaw_sum
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.18.4The AD multiple inelastic stress calculator shall provide a correct stress when cycling through two identical power law creep models
Specification(s): powerlaw_cycle
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.18.5The AD multiple inelastic stress calculator shall provide a correct jacobian for a single power law creep model
Specification(s): powerlaw_ten_jacobian
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.18.6The AD multiple inelastic stress calculator shall provide a correct jacobian for a single power law creep model and an additional zero creep power law model
Specification(s): powerlaw_zero_jacobian
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.18.7The AD multiple inelastic stress calculator shall provide a correct jacobian for the linear combination of two power law creep models
Specification(s): powerlaw_sum_jacobian
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.18.8The AD multiple inelastic stress calculator shall provide a correct jacobian when cycling through two identical power law creep models
Specification(s): powerlaw_cycle_jacobian
Design: ADComputeMultipleInelasticStress
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.1The ADPowerLawCreepStressUpdate, called through the ADComputeMultipleInelasticStress, shall compute a creep strain based on an extrenal loading.
Specification(s): creep
Design: ADPowerLawCreepStressUpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.2The Jacobian for the AD regular creep problem shall be perfect
Specification(s): creep-jac
Design: ADPowerLawCreepStressUpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.3The ADViscoplasticityStressUpdate class shall compute a ratio between the gauge stress, equilvalent stress, and hydrostatic stress across a wide swath of exponents and stress states using spherical pore geometry.
Specification(s): exact_spherical
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.4The Jacobian for the AD exact spherical problem shall be perfect
Specification(s): exact_spherical-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.5The ADViscoplasticityStressUpdate class shall compute a ratio between the gauge stress, equilvalent stress, and hydrostatic stress across a wide swath of exponents and stress states using spherical pore geometry.
Specification(s): exact_cylindrical
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.6The Jacobian for the AD exact cylindrical problem shall be perfect
Specification(s): exact_cylindrical-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.7The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using a single model with LPS spherical formulation that increases the porosity due to an external strain.
Specification(s): lps_single
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.8The Jacobian for the AD lps single problem shall be perfect
Specification(s): lps_single-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.9The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using two LPS models with spherical formulations and the same stress exponential that is close to combining the models into a single ADViscoplasticityStressUpdate instance.
Specification(s): lps_single_split
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.10The Jacobian for the AD lps single split problem shall be perfect
Specification(s): lps_single_split-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.11The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using two LPS models with spherical formulations and two different stress exponents that increases the porosity due to an external strain.
Specification(s): lps_dual
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.12The Jacobian for the AD lps dual problem shall be perfect
Specification(s): lps_dual-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.13The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using a single model with GTN formulation that increases the porosity due to an external strain.
Specification(s): gtn_single
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.14The Jacobian for the AD gtn single problem shall be perfect
Specification(s): gtn_single-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.15The system shall handle a negative calculated porosity computed from a strain tensor
- by setting the porosity to zero.
- by setting the porosity to the initial condition.
- by throwing an exception.
Specification(s): negative/zero, negative/initial, negative/exception
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- tensor_mechanics: Pressure Action System
- 2.19.1The Pressure boundary condition action shall create the objects needed to apply automatic differentiation pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure and match non-AD methods.
Specification(s): 3D
Design: Pressure Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.19.2The Pressure boundary condition action shall create the objects needed to apply automatic differentiation pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure using the volumetric locking correction b-bar formulation and match non-AD methods.
Specification(s): 3D_Bbar
Design: Pressure Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.19.3The Pressure boundary condition action shall create the objects needed to apply automatic differentiation pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure and calculate a perfect Jacobian.
Specification(s): 3D-jac
Design: Pressure Action System
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.19.4The Pressure boundary condition action shall create the objects needed to apply automatic differentiation pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure using the volumetric locking correction b-bar formulation and calculate a perfect Jacobian.
Specification(s): 3D_Bbar-jac
Design: Pressure Action System
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.87.1The Pressure boundary condition action shall create the objects needed to apply pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure.
Specification(s): 3D
Design: Pressure Action System
Issue(s): #4781
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.87.2The Pressure boundary condition action shall create the objects needed to apply pressure boundary conditions on a 3D model as demonstrated by correctly computing the response of an elastic small-strain isotropic unit cube with pressure applied on three faces to create a hydrostatic pressure using the volumetric locking correction b-bar formulation.
Specification(s): 3D_Bbar
Design: Pressure Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Radial Return Stress Update
- 2.20.1The return mapping algorithm shall use automatic differentiation to compute the derivative of the yield function with respect to the internal variable, and the solution should be the same as existing hand coded derivative.
Specification(s): reference
Design: Radial Return Stress Update
Issue(s): #20407
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.13The system shall return an error if the user requests substepping for a radial return inelastic model that does not implement it yet.
Specification(s): isotropic_plasticity_substepping_error
Design: Radial Return Stress Update
Issue(s): #14757
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Compute Small Strain
- 2.21.1We shall be able to run a simple linear small-strain problem using a hand-coded Jacobian
Specification(s): linear-hand-coded
Design: Compute Small Strain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.21.4The Jacobian for the hand-coded problem shall be perfect
Specification(s): linear-hand-coded-jac
Design: Compute Small Strain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.25.1The mechanics system shall be capable of accurately computing the elastic response of an anisotropic elastic material where 6 components of a symmetric elasticity tensor are output on an irregular patch of elements with total small strain assumptions
Specification(s): test
Design: Compute Linear Elastic StressCompute Small StrainTensor Mechanics Master Action System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.3The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an total small-strain calculation.
Specification(s): elastic_patch_total_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Small StrainCompute Linear Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADComputeSmallStrain
- 2.21.2We shall be able to reproduce the results of the hand-coded simulation using automatic differentiation in the production stress divergence kernel
Specification(s): linear-ad
Design: ADComputeSmallStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.21.3We shall be able to reproduce the results of the hand-coded simulation using automatic differentiation with reversed stress and strain materials
Specification(s): linear-ad-reverse
Design: ADComputeSmallStrain
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.21.5The Jacobian for the automatic differentiation problem shall be perfect
Specification(s): linear-ad-jac
Design: ADComputeSmallStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.21.6The Jacobian for the automatic differentiation problem with reversed stress and strain materials shall be perfect
Specification(s): linear-ad-jac-reverse
Design: ADComputeSmallStrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: AD Compute Smeared Cracking Stress
- 2.22.1The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in cartesian coordinates using AD and match non-AD methods.
Specification(s): cracking
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.2The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in cartesian coordinates using the deprecated input file using AD and match non-AD methods.
Specification(s): cracking_deprecated
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.3The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in rz coordinates using AD and match non-AD methods.
Specification(s): cracking_rz
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.4The MOOSE TensorMechanics module shall simulate cracking while the cracking strength is prescribed by an elemental AuxVariable using AD and match non-AD methods.
Specification(s): cracking_function
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.5The MOOSE TensorMechanics module shall simulate exponential stress release using AD and match non-AD methods.
Specification(s): exponential
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.6The MOOSE TensorMechanics module shall simulate exponential stress relase, using the deprecated input file using AD and match non-AD methods.
Specification(s): exponential_deprecated
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.7The MOOSE TensorMechanics module shall simulate exponential stress relase while using the rz coordinate system using AD and match non-AD methods.
Specification(s): rz_exponential
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.8The MOOSE TensorMechanics module shall demonstrate softening using the power law for smeared cracking using AD and match non-AD methods.
Specification(s): power
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.9The MOOSE TensorMechanics module shall demonstrate the prescribed softening laws in three directions, power law (x), exponential (y), and abrupt (z) using AD and match non-AD methods.
Specification(s): multiple_softening
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.10The MOOSE TensorMechanics module shall simulate smeared cracking in the x y and z directions using AD and match non-AD methods.
Specification(s): xyz
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.11The MOOSE TensorMechanics module shall simulate smeared cracking under plane stress conditions using AD and match non-AD methods.
Specification(s): plane_stress
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.12The MOOSE TensorMechanics module shall demonstrate that the smeared cracking model correctly handles finite rotation of cracked elements using AD and match non-AD methods.
Specification(s): cracking_rotation
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.13The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where the crack is prescribed in x using AD and match non-AD methods.
Specification(s): cracking_rotation_pres_dir_x
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.14The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where the crack is prescribed in z using AD and match non-AD methods.
Specification(s): cracking_rotation_pres_dir_z
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.15The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where two cracks are prescribed in x and z using AD and match non-AD methods.
Specification(s): cracking_rotation_pres_dir_xz
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.22.16The MOOSE TensorMechanics module shall compute accurate AD Jacobian of system with multiple softening laws.
Specification(s): ad_multiple_softening_jacobian
Design: AD Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ComputeMeanThermalExpansionFunctionEigenstrain
- 2.23.1The system shall compute an eigenstrain due to thermal expansion using a function that describes a constant mean and instantaneous thermal expansion using the AD formulation
- and the finite strain formulation
- and the small strain formulation
Specification(s): constant/finite, constant/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.23.2The system shall compute an eigenstrain due to thermal expansion using a function that describes a mean and instantaneous thermal expansion with a linear relationship to temperature using the AD formulation
- and the finite strain formulation
- and the small strain formulation
Specification(s): linear/finite, linear/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.23.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient and compute a perfect jacobian
- using a instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient and compute a perfect jacobian
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/mean_complex, individual/mean_complex_jac, individual/instantaneous, individual/instantaneous_complex, individual/instantaneous_complex_jac, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTesterCSVDiff
- 2.104.1The system shall compute an eigenstrain due to thermal expansion using a function that describes a constant mean and instantaneous thermal expansion
- using finite strain formulation
- using small strain formulation
Specification(s): constant/finite, constant/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.104.2The system shall compute an eigenstrain due to thermal expansion using a function that describes a mean and instantaneous thermal expansion with a linear relationship to temperature
- using finite strain formulation
- using small strain formulation
Specification(s): linear/finite, linear/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.104.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a instantaneous thermal expansion coefficient
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/instantaneous, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeInstantaneousThermalExpansionFunctionEigenstrain
- 2.23.1The system shall compute an eigenstrain due to thermal expansion using a function that describes a constant mean and instantaneous thermal expansion using the AD formulation
- and the finite strain formulation
- and the small strain formulation
Specification(s): constant/finite, constant/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.23.2The system shall compute an eigenstrain due to thermal expansion using a function that describes a mean and instantaneous thermal expansion with a linear relationship to temperature using the AD formulation
- and the finite strain formulation
- and the small strain formulation
Specification(s): linear/finite, linear/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #12650
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.23.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient and compute a perfect jacobian
- using a instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient and compute a perfect jacobian
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/mean_complex, individual/mean_complex_jac, individual/instantaneous, individual/instantaneous_complex, individual/instantaneous_complex_jac, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTesterCSVDiff
- 2.104.1The system shall compute an eigenstrain due to thermal expansion using a function that describes a constant mean and instantaneous thermal expansion
- using finite strain formulation
- using small strain formulation
Specification(s): constant/finite, constant/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.104.2The system shall compute an eigenstrain due to thermal expansion using a function that describes a mean and instantaneous thermal expansion with a linear relationship to temperature
- using finite strain formulation
- using small strain formulation
Specification(s): linear/finite, linear/small_const
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrain
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.104.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a instantaneous thermal expansion coefficient
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/instantaneous, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeDilatationThermalExpansionFunctionEigenstrain
- 2.23.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient
- using a complex mean thermal expansion coefficient and compute a perfect jacobian
- using a instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient
- using a complex instantaneous thermal expansion coefficient and compute a perfect jacobian
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/mean_complex, individual/mean_complex_jac, individual/instantaneous, individual/instantaneous_complex, individual/instantaneous_complex_jac, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTesterCSVDiff
- 2.104.3The system shall compute an eigenstrain due and allow a smooth transition from negative to positive strain across the reference temperature and compare favorably to hand calculations
- using a mean thermal expansion coefficient
- using a instantaneous thermal expansion coefficient
- using a dilatation thermal expansion coefficient
Specification(s): individual/mean, individual/instantaneous, individual/dilatation
Design: ComputeMeanThermalExpansionFunctionEigenstrainComputeInstantaneousThermalExpansionFunctionEigenstrainComputeDilatationThermalExpansionFunctionEigenstrain
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: AD Viscoplasticity Stress Update
- 2.24.3The ADViscoplasticityStressUpdate class shall compute a ratio between the gauge stress, equilvalent stress, and hydrostatic stress across a wide swath of exponents and stress states using spherical pore geometry.
Specification(s): exact_spherical
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.4The Jacobian for the AD exact spherical problem shall be perfect
Specification(s): exact_spherical-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.5The ADViscoplasticityStressUpdate class shall compute a ratio between the gauge stress, equilvalent stress, and hydrostatic stress across a wide swath of exponents and stress states using spherical pore geometry.
Specification(s): exact_cylindrical
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.6The Jacobian for the AD exact cylindrical problem shall be perfect
Specification(s): exact_cylindrical-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.7The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using a single model with LPS spherical formulation that increases the porosity due to an external strain.
Specification(s): lps_single
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.8The Jacobian for the AD lps single problem shall be perfect
Specification(s): lps_single-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.9The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using two LPS models with spherical formulations and the same stress exponential that is close to combining the models into a single ADViscoplasticityStressUpdate instance.
Specification(s): lps_single_split
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.10The Jacobian for the AD lps single split problem shall be perfect
Specification(s): lps_single_split-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.11The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using two LPS models with spherical formulations and two different stress exponents that increases the porosity due to an external strain.
Specification(s): lps_dual
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.12The Jacobian for the AD lps dual problem shall be perfect
Specification(s): lps_dual-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.13The ADViscoplasticityStressUpdate class shall compute the viscoplastic response using a single model with GTN formulation that increases the porosity due to an external strain.
Specification(s): gtn_single
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.24.14The Jacobian for the AD gtn single problem shall be perfect
Specification(s): gtn_single-jac
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.24.15The system shall handle a negative calculated porosity computed from a strain tensor
- by setting the porosity to zero.
- by setting the porosity to the initial condition.
- by throwing an exception.
Specification(s): negative/zero, negative/initial, negative/exception
Design: AD Viscoplasticity Stress UpdateADComputeMultipleInelasticStress
Issue(s): #13494
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- tensor_mechanics: Rank Two Scalar Aux
- 2.26.1The system shall compute the VonMises value of a RankTwoTensor
Specification(s): ranktwoscalaraux
Design: Rank Two Scalar Aux
Issue(s): #4774
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.26.2The system shall allow RankTwoScalarAux to output principal stresses
Specification(s): principalstress
Design: Rank Two Scalar Aux
Issue(s): #5516
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.112.1The ComputeVolumetricEigenStrainClass shall correctly compute an eigenstrain tensor that results in a solution that exactly recovers the specified volumetric expansion, and the reported volumetric strain computed by RankTwoScalarAux shall match the prescribed volumetric strain.
Specification(s): test
Design: Compute Volumetric EigenstrainRank Two Scalar Aux
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.112.2The volumetric strain computed using RankTwoScalarAux for a unit cube with imposed displacements shall be identical to that obtained by imposing an eigenstrain that causes the same deformation of that model.
Specification(s): test_mechanical
Design: Compute Volumetric EigenstrainRank Two Scalar Aux
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ElasticEnergyAux
- 2.26.3The system shall compute the local elastic energy
Specification(s): tensorelasticenergyaux
Design: ElasticEnergyAux
Issue(s): #13635
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.1The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes.
Specification(s): elastic_patch
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.2The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation.
Specification(s): elastic_patch_incremental_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.3The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an total small-strain calculation.
Specification(s): elastic_patch_total_small
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Small StrainCompute Linear Elastic Stress
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.4The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes using an incremental small-strain calculation with no displaced mesh created.
Specification(s): elastic_patch_incremental_small_no_disp_mesh
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Incremental Small StrainCompute Finite Strain Elastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.5The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when using volumetric locking correction.
Specification(s): elastic_patch_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.6The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.7The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular hexes when employing volumetric locking correction and running on 2 processors in parallel.
Specification(s): elastic_patch_2Procs_Bbar
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic StressVolumetric Locking Correction
Issue(s): #458
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.44.8The tensor mechanics module shall have the ability to compute spatially uniform stresses under prescribed linearly varying displacements on a set of irregular 20-noded quadratic hexes.
Specification(s): elastic_patch_quadratic
Design: ElasticEnergyAuxCompute Isotropic Elasticity TensorCompute Finite Strain Elastic Stress
Issue(s): #620
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Line Element Action System
- 2.27.1The LineElementAction class shall correctly create the objects required for a mechanics simulation using beam or truss elements.
Specification(s): 2_block_action
Design: Line Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.2The LineElementAction class shall correctly set the common parameters in the action subblocks.
Specification(s): 2_block_common_action
Design: Line Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.3The LineElementAction class shall produce an error when the displacement variables are not provided by the user.
Specification(s): beam_action_test1
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.4The LineElementAction class shall produce an error if the user provided inputs for
strain_type,rotation_typeanduse_displaced_meshparameters are not compatible.Specification(s): beam_action_test2
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.5The LineElementAction class shall produce an error if the number of variables listed in the
save_inparameter differs from the number of displacement variables.Specification(s): beam_action_test3
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.6The LineElementAction class shall produce an error if the number of variables listed in the
diag_save_inparameter differs from the number of displacement variables.Specification(s): beam_action_test4
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.7The LineElementAction class shall produce an error if the names for the rotational degrees of freedom are not provided by the user.
Specification(s): beam_action_test5
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.8The LineElementAction class shall produce an error if the number of rotational variables provided as input differs from the number of displacement variables.
Specification(s): beam_action_test6
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.9The LineElementAction class shall produce an error if the moment of inertia, area and orientation of the beam are not provided as input.
Specification(s): beam_action_test7
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.10The LineElementAction class shall produce an error if translational and rotational velocities and accelerations are not provided as input for dynamic simulations using beam elements.
Specification(s): beam_action_test8
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.11The LineElementAction class shall produce an error if the number of translational and rotational velocities and accelerations differs from the number of displacement variables.
Specification(s): beam_action_test9
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.12The LineElementAction class shall produce an error if Newmark time integration parameters (
betaandgamma) are not provided as input for dynamic simulations using beam elements.Specification(s): beam_action_test10
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.13The LineElementAction class shall produce an error if density is not provided as input for dynamic beam simulations using beams elements with consistent mass/inertia matrix.
Specification(s): beam_action_test11
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.14The LineElementAction class shall produce an error if nodal mass is not provided as input for dynamic beam simulations using beam elements with nodal mass matrix.
Specification(s): beam_action_test12
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.15The LineElementAction class shall produce an error if nodal inertia is not provided as input for dynamic beam simulations using beam elements with nodal inertia matrix.
Specification(s): beam_action_test13
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.16The LineElementAction class shall produce an error if multiple subblocks specify properties for the same mesh block.
Specification(s): beam_action_test14
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.17The LineElementAction class shall produce an error if an action subblock is mesh block restricted while another is not.
Specification(s): beam_action_test15
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.18The LineElementAction class shall produce an error if
dynamic_nodal_translational_inertiais set to true in the common action block but the subblocks do not have the parameters required for a dynamic beam simulation using beam elements.Specification(s): beam_action_test16
Design: Line Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.30The LineElementAction shall create the translational and rotational velocities and accelerations required for a dynamic simulation using beam elements.
Specification(s): add_dynamic_variables_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.33The LineElementAction shall correctly create the input blocks required for a dynamic beam simulation using beam elements and a consistent mass/inertia matrix in the presence of Rayleigh damping and numerical damping in the form of Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): dyn_euler_rayleigh_hht_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.34The LineElmentAction shall correctly create the input blocks required for a dynamic beam simulation using beam elements and nodal mass/inertia matrix in the presence of Rayleigh damping and numerical damping in the form of Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): dyn_euler_added_mass_inertia_damping_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.51The LineElementAction class shall produce an error if
add_dynamic_variablesoption is set to false whiledynamic_consistent_inertia,dynamic_nodal_rotational_inertiaordynamic_nodal_translational_inertiaoptions are set to true.Specification(s): error_16
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: C0 Timoshenko Beam Element
- 2.27.19The mechanics system shall accurately predict the displacement of a beam element with a frictionless contact constraint.
Specification(s): frictionless_constraint
Design: C0 Timoshenko Beam Element
Issue(s): #14873
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.20The mechanics system shall accurately predict the displacement of a beam element with a glued contact constraint.
Specification(s): glued_constraint
Design: C0 Timoshenko Beam Element
Issue(s): #14873
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.21The mechanics system shall accurately predict the displacement of a beam element with a frictional contact constraint.
Specification(s): frictional_constraint
Design: C0 Timoshenko Beam Element
Issue(s): #14873
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.22The mechanics system shall correctly predict the natural frequencies of an Euler-Bernoulli beam modeled using beam elements with consistent mass/inertia.
Specification(s): dyn_euler
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.23The mechanics system shall correctly predict the natural frequencies of a Timoshenko beam modeled using beam elements with consistent mass/inertia.
Specification(s): dyn_timoshenko
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.24The mechanics system shall correctly predict the natural frequencies of an Euler-Bernoulli beam modeled using beam elements in the presence of Rayleigh damping and numerical damping introduced by Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): dyn_euler_rayleigh_hht
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.25The mechanics system shall correctly predict the natural frequencies of an Euler-Bernoulli beam modeled using beam elements in the presence of Rayleigh damping and numerical damping introduced by Hilber-Hughes-Taylor (HHT) time integration when using the velocity and acceleration computed using the Newmark-Beta time integrator.
Specification(s): dyn_euler_rayleigh_hht_ti
Design: C0 Timoshenko Beam Element
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.26The mechanics system shall correctly predict the natural frequencies of a massless Euler-Bernoulli beam modeled using beam elements with a nodal masses placed at the ends.
Specification(s): dyn_euler_added_mass
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.27The mechanics system shall correctly predict the natural frequencies of a massless Euler-Bernoulli beam modeled using beam elements with added nodal masses when the location and values of the masses are provided using a csv file.
Specification(s): dyn_euler_added_mass_file
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.28The mechanics system shall correctly model the response of a beam modeled using beam elements when gravitational force (proportional to nodal mass) is applied to the beam.
Specification(s): dyn_euler_added_mass_gravity
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.29The mechanics system shall correctly model the response of a beam modeled using beam elements under gravitational force when the nodal mass distribution is provided using a csv file.
Specification(s): dyn_euler_added_mass_gravity_2
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.30The LineElementAction shall create the translational and rotational velocities and accelerations required for a dynamic simulation using beam elements.
Specification(s): add_dynamic_variables_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.31The mechanics system shall correctly model the response of a beam modeled using beam elements in the presence of nodal mass, nodal inertia and Rayleigh damping.
Specification(s): dyn_euler_added_mass_inertia_damping
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.32The mechanics system shall correctly model the response of a beam modeled using beam elements in the presence of nodal mass, nodal inertia and Rayleigh damping when using the velocity and accelerations computed by the Newmark-Beta time integrator.
Specification(s): dyn_euler_added_mass_inertia_damping_ti
Design: C0 Timoshenko Beam Element
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.33The LineElementAction shall correctly create the input blocks required for a dynamic beam simulation using beam elements and a consistent mass/inertia matrix in the presence of Rayleigh damping and numerical damping in the form of Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): dyn_euler_rayleigh_hht_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.34The LineElmentAction shall correctly create the input blocks required for a dynamic beam simulation using beam elements and nodal mass/inertia matrix in the presence of Rayleigh damping and numerical damping in the form of Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): dyn_euler_added_mass_inertia_damping_action
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.35The mechanics system shall correctly predict the natural frequency of a cantilever beam modeled using beam elements with a mass at the free end.
Specification(s): dyn_euler_added_mass2
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.36The InertialForceBeam class shall produce an error if the number of variables provided for rotations differs from that provided for displacements.
Specification(s): error_1
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.37The NodalRotatioanlInertia class shall produce an error if the number of rotational velocities and accelerations provided as input differ from the number of rotations.
Specification(s): error_2
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.38The NodalRotationalInertia class shall produce an error if the user provided nodal inertia is not positive definite.
Specification(s): error_3
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.39The NodalRotatioanlInertia class shall produce an error if the user provided x and y orientations are not unit vectors.
Specification(s): error_4
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.40The NodalRotatioanlInertia class shall produce an error if the user provided x and y orientations are not perpendicular to each other.
Specification(s): error_5
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.41The NodalRotatioanlInertia class shall produce an error if only x or y orientation is provided as input by the user.
Specification(s): error_6
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.42The InertialForceBeam class shall produce an error if the number of translational and rotational velocities and accelerations provided as input differ from the number of displacement variables.
Specification(s): error_7
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.43The NodalTranslationalInertia class shall produce an error if nodal mass is provided as input both as a constant value and also using a csv file.
Specification(s): error_8
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.44The NodalTranslationalInertia class shall produce an error if nodal mass is not provided as input either as a constant value or using a csv file.
Specification(s): error_9
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.45The NodalTranslationalInertia class shall produce an error if the number of columns in the nodal mass file is not 4.
Specification(s): error_10
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.46The NodalTranslationalInertia class shall produce an error if all the nodal positions provided in the nodal mass file cannot be found in the given boundary or mesh block.
Specification(s): error_11
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.47The NodalGravity class shall produce an error if nodal mass is provided as input both as a constant value and also using a csv file.
Specification(s): error_12
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.48The NodalGravity class shall produce an error if nodal mass is not provided as input either as a constant value or using a csv file.
Specification(s): error_13
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.49The NodalGravity class shall produce an error if the number of columns in the nodal mass file is not 4.
Specification(s): error_14
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.50The NodalGravity class shall produce an error if all the nodal positions provided in the nodal mass file cannot be found in the given boundary or mesh block.
Specification(s): error_15
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.51The LineElementAction class shall produce an error if
add_dynamic_variablesoption is set to false whiledynamic_consistent_inertia,dynamic_nodal_rotational_inertiaordynamic_nodal_translational_inertiaoptions are set to true.Specification(s): error_16
Design: C0 Timoshenko Beam ElementLine Element Action System
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.52The NodalTranslationalInertia class shall produce an error if nodal mass is provided as input both as constant value and also using a csv file.
Specification(s): error_17
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.56The mechanics system shall accurately predict the static bending response of a Timoshenko beam modeled using beam elements under small deformations in the y direction.
Specification(s): timoshenko_small_strain_y
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.57The mechanics system shall accurately predict the static bending response of a Timoshenko beam modeled using beam elements under small deformations in the z direction.
Specification(s): timoshenko_small_strain_z
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.58The mechanics system shall accurately predict the static bending response of a Euler-Bernoulli beam modeled using beam elements under small deformations in the y direction.
Specification(s): euler_small_strain_y
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.59The mechanics system shall accurately predict the static bending response of a Euler-Bernoulli beam modeled using beam elements under small deformations in the z direction.
Specification(s): euler_small_strain_z
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.60The mechanics system shall accurately predict the static bending response of a Euler-Bernoulli beam modeled using beam elements under finite deformations in the y direction.
Specification(s): euler_finite_rot_y
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.61The mechanics system shall accurately predict the static bending response of a Euler-Bernoulli beam modeled using beam elements under finite deformations in the z direction.
Specification(s): euler_finite_rot_z
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.62The LineElementAction class shall accurately create the objects required to model the static bending response of an Euler-Bernoulli beam modeled using beam elements under small deformations.
Specification(s): euler_small_y_with_action
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.63The LineElementAction class shall accurately create the objects required to model the static bending response of an Euler-Bernoulli beam modeled using beam elements under finite deformations.
Specification(s): euler_finite_y_with_action
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.64The mechanics system shall accurately predict the axial displacement of an Euler-Bernoulli pipe modeled using beam elements.
Specification(s): euler_pipe_axial_disp
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.65The mechanics system shall accurately predict the axial forces on an Euler-Bernoulli pipe modeled using beam elements.
Specification(s): euler_pipe_axial_force
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): CSVDiff
Verification: Beams
- 2.27.66The mechanics system shall accurately predict the bending response of an Euler-Bernoulli pipe modeled using beam elements.
Specification(s): euler_pipe_bend
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.67The ComputeIncrementalBeamStrain class shall produce an error if the number of supplied displacements and rotations do not match.
Specification(s): error_displacements1
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.68The StressDivergenceBeam class shall produce an error if the number of supplied displacements and rotations do not match.
Specification(s): error_displacements2
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.69The ComputeIncrementalBeamStrain class shall produce an error if large strain calculation is requested for asymmetric beam configurations with non-zero first or third moments of area.
Specification(s): error_large_strain
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.70The ComputeIncrementalBeamStrain class shall produce an error if the y orientation provided is not perpendicular to the beam axis.
Specification(s): error_y_orientation
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.27.71The mechanics system shall accurately predict the torsional response of a beam modeled using beam elements with auto-calculated polar moment of inertia.
Specification(s): torsion_1
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
Verification: Beams
- 2.27.72The mechanics system shall accurately predict the torsional response of a beam modeled using beam elements with user provided polar moment of inertia.
Specification(s): torison_2
Design: C0 Timoshenko Beam Element
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.73The mechanics system shall accurately predict the static bending response of an Euler beam modeled using beam elements under small deformation when the beam is
- oriented along the global Z axis.
- oriented on the YZ plane at a 45 deg. angle.
- oriented on the YZ plane at a 45 deg. angle and has in-plane loading.
- oriented on the YZ plane at a 45 deg. angle and has in-plane loading with non-symmetric cross section geometry.
- oriented on the YZ plane at a 45 deg. angle and has in-plane loading and the cross section geometry is non-symmetric.
- oriented along the global Y axis.
- oriented on the XZ plane at a 45 deg. angle.
- oriented on the XZ plane at a 45 deg. angle, and the external loading takes place on the same plane.
- oriented on the XY plane at a 45 deg. angle.
- oriented on the XY plane at a 45 deg. angle, and the external loading takes place on the same plane.
Specification(s): euler_small_strain/orientation_z, euler_small_strain/orientation_yz, euler_small_strain/orientation_yz_force_yz, euler_small_strain/orientation_yz_force_yz_cross_section, euler_small_strain/orientation_yz_cross_section, euler_small_strain/orientation_y, euler_small_strain/orientation_xz, euler_small_strain/orientation_xz_force_xz, euler_small_strain/orientation_xy, euler_small_strain/orientation_xy_force_xy
Design: C0 Timoshenko Beam Element
Issue(s): #14772
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.27.74The mechanics system shall accurately predict the static bending response of an Euler beam modeled using beam elements under small deformations when the beam is
- subjected to simply supported BCs and distributed loading.
- subjected to combined bending and torsion loading.
Specification(s): verification_tests/ansys_vm2, verification_tests/ansys_vm12
Design: C0 Timoshenko Beam Element
Issue(s): #14772
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Thermal Expansion Eigenstrain Beam
- 2.27.53The ComputeThermalExpansionEigenstrainBeam class shall correctly calculate eigenstrains due to changes in temperature.
Specification(s): thermal_eigenstrain
Design: Compute Thermal Expansion Eigenstrain Beam
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Eigenstrain Beam From Variable
- 2.27.54The ComputeEigenstrainBeamFromVariable class shall correctly transfer eigenstrains from auxvariables into eigenstrain material property.
Specification(s): eigenstrain_from_var
Design: Compute Eigenstrain Beam From Variable
Issue(s): #10313
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.27.55The ComputeEigenstrainBeamFromVariable class shall report an error if less than 3 displacement or rotational eigenstrains are provided by the user.
Specification(s): eigenstrain_from_var_test1
Design: Compute Eigenstrain Beam From Variable
Issue(s): #10313
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: CappedWeakPlaneStressUpdate
- 2.30.1The CappedWeakPlaneStressUpdate model shall generate an error if the friction angle is negative
Specification(s): except1
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.2The CappedWeakPlaneStressUpdate model shall generate an error if the dilation angle is negative
Specification(s): except2
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.3The CappedWeakPlaneStressUpdate model shall generate an error if the friction angle is less than the dilation angle
Specification(s): except3
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.4The CappedWeakPlaneStressUpdate model shall generate an error if the cohesion is negative
Specification(s): except4
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.5The CappedWeakPlaneStressUpdate model shall generate an error if the sum of the tensile and compressive strength is less than smoothing_tol
Specification(s): except5
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.6The CappedWeakPlaneStressUpdate model shall generate an error if the normal vector has zero length
Specification(s): except6
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.30.7The CappedWeakPlaneStressUpdate model shall correctly compute stresses in the elastic regime
Specification(s): small1
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.8The CappedWeakPlaneStressUpdate model shall correctly represent tensile failure with the Lame coefficient lambda=0
Specification(s): small2
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.9The CappedWeakPlaneStressUpdate model shall correctly represent tensile failure with the Lame coefficient lambda=4
Specification(s): small3
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.10The CappedWeakPlaneStressUpdate model shall correctly represent compression failure
Specification(s): small4
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.11The CappedWeakPlaneStressUpdate model shall correctly represent shear failure
Specification(s): small5
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.12The CappedWeakPlaneStressUpdate model shall correctly represent both tensile and shear failure
Specification(s): small6
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.13The CappedWeakPlaneStressUpdate model shall correctly represent tensile behavior with hardening
Specification(s): small7
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.14The CappedWeakPlaneStressUpdate model shall correctly represent compression behavior with hardening
Specification(s): small8
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.15The CappedWeakPlaneStressUpdate model shall correctly represent shear behavior with hardening
Specification(s): small9
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.16The CappedWeakPlaneStressUpdate model shall correctly represent hardening under combined tension and shear
Specification(s): small10
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.17The CappedWeakPlaneStressUpdate model shall correctly represent hardening under combined tension and shear with an initial stress
Specification(s): small11
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.18The CappedWeakPlaneStressUpdate model shall correctly represent the behavior of a column of elements that is pulled, then pushed
Specification(s): pull_push
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.19The CappedWeakPlaneStressUpdate model shall correctly represent the behavior of a column of elements that is pulled, then pushed, with tensile hardening
Specification(s): pull_push_h
Design: CappedWeakPlaneStressUpdate
Issue(s): #7784
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.20The CappedWeakPlaneStressUpdate model shall correctly represent the behavior of a beam with its ends fully clamped
Specification(s): cwp_beam
Design: CappedWeakPlaneStressUpdate
Issue(s): #7960
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.21The CappedWeakPlaneStressUpdate model shall correctly represent the tensile failure of a single layer of elements in 1 nonlinear step
Specification(s): pull_and_shear_1step
Design: CappedWeakPlaneStressUpdate
Issue(s): #7960
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.22The CappedWeakPlaneStressUpdate model shall correctly represent a dynamic problem with plasticity in which a column of material is pulled in tension
Specification(s): pull_and_shear
Design: CappedWeakPlaneStressUpdate
Issue(s): #7960
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.23The CappedWeakPlaneStressUpdate model shall correctly represent a dynamic problem with plasticity in which a column of material is pushed in compression
Specification(s): push_and_shear
Design: CappedWeakPlaneStressUpdate
Issue(s): #7960
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.30.24The system shall permit exceptions to be thrown from material models with stateful properties without reading/writing to/from uninitialized memory
Specification(s): throw_test
Design: CappedWeakPlaneStressUpdate
Issue(s): #7960
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: CappedWeakInclinedPlaneStressUpdate
- 2.30.25The CappedWeakInclinedPlaneStressUpdate model shall correctly represent tensile failure with a specified normal=(1,0,0)
Specification(s): small_inclined2
Design: CappedWeakInclinedPlaneStressUpdate
Issue(s): #8303
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.26The CappedWeakPlaneStressUpdate model shall correctly represent tensile failure with a specified normal=(0,1,0)
Specification(s): small_inclined3
Design: CappedWeakInclinedPlaneStressUpdate
Issue(s): #8303
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.27The CappedWeakPlaneStressUpdate model shall correctly represent shear failure with a specified normal=(1,0,0)
Specification(s): small_inclined5
Design: CappedWeakInclinedPlaneStressUpdate
Issue(s): #8303
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: CappedWeakPlaneCosseratStressUpdate
- 2.30.28The CappedWeakPlaneCosseratStressUpdate model shall correctly represent plastic behavior under a first set of loading conditions
Specification(s): small_cosserat1
Design: CappedWeakPlaneCosseratStressUpdate
Issue(s): #8431
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.29The CappedWeakPlaneCosseratStressUpdate model shall correctly represent plastic behavior under a second set of loading conditions
Specification(s): small_cosserat2
Design: CappedWeakPlaneCosseratStressUpdate
Issue(s): #8431
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.30The CappedWeakPlaneCosseratStressUpdate model shall correctly represent plastic behavior under a third set of loading conditions
Specification(s): small_cosserat3
Design: CappedWeakPlaneCosseratStressUpdate
Issue(s): #8431
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.30.31The CappedWeakPlaneCosseratStressUpdate model shall correctly represent plastic behavior under a fourth set of loading conditions
Specification(s): small_cosserat4
Design: CappedWeakPlaneCosseratStressUpdate
Issue(s): #8431
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: CentralDifference
- 2.31.1The NewmarkBeta timeintegrator shall correctly calculate the response of a 1D mesh.
Specification(s): implicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.2The CentralDifference timeintegrator shall correctly calculate the response of a 1D mesh when the the consistent mass matrix option is used.
Specification(s): explicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.3The NewmarkBeta timeintegrator shall correctly calculate the response of a 2D mesh.
Specification(s): implicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.4The CentralDifference timeintegrator shall correctly calculate the response of a 2D mesh when the the consistent mass matrix option is used.
Specification(s): explicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.5The NewmarkBeta timeintegrator shall correctly calculate the response of a 3D mesh.
Specification(s): implicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.6The CentralDifference timeintegrator shall correctly calculate the response of a 3D mesh when the the consistent mass matrix option is used.
Specification(s): explicit
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.7The system shall include central difference time integration that correctly calculates the response of a 1D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): explicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.8The system shall include Newmark-beta time integration that correctly calculate the response of a 1D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): implicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.9The system shall include a central difference time integration that when used with the lumped mass shall correctly calculate the response of a 1D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_lumped
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.10The system shall include central difference time integration that when used with the constant mass option shall correctly calculate the response of a 1D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_constant_mass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.11The system shall include central difference time integration that correctly calculates the response of a 2D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): explicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.12The system shall include Newmark-beta time integration that correctly calculates the response of a 2D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): implicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.13The system syall include central difference time integration that when used with the lumped mass option shall correctly calculate the response of a 2D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_lumped
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.14The system syall include central difference time integration that when used with the constant mass option shall correctly calculate the response of a 2D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_constant_mass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.15The system shall include central difference time integration that correctly calculates the response of a 3D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): explicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.16The system shall include Newmar-beta time integration that correctly calculates the response of a 3D mesh with nodal masses equal to those of a corresponding lumped mass system.
Specification(s): implicit_nodalmass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.17The system shall include central difference time integration that when used with the lumped mass option shall correctly calculate the response of a 3D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_lumped
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.31.18The system shall include central difference time integration that when used with the constant mass option shall correctly calculate the response of a 3D mesh and produce results that are identical to those calculated using equivalent nodal masses.
Specification(s): explicit_constant_mass
Design: CentralDifference
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: PureElasticTractionSeparation
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZMComputeDisplacementJumpSmallStrain
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZMComputeGlobalTractionSmallStrain
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZM InterfaceKernelSmallStrain
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZMComputeDisplacementJumpTotalLagrangian
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZMComputeGlobalTractionTotalLagrangian
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: CZMInterfaceKernelTotalLagrangian
- 2.33.1The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The small strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The finite strain cohesive zone model shall converge quadratically when using the hand-coded Jacobian
- The small strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The finite strain cohesive zone model shall return the same results of the total formulation when using an incremental material
- The system shall allow using multiple CohesiveZoneAction and different cohesive materials for different boundaries
- The system shall error out when different strains are provided in different blocks of the CohesiveZoneAction
- The system shall error out when overlapping boundaries are provided in different blocks of the CohesiveZoneAction
- The system shall use the common block generate output and additional outputs for all CZM blocks
- The system shall add additional outputs requested within each block
- The system shall be able to use different output orders on different blocks
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using the PureElasticTractionSeparation model, and only compute a normal gap under purely normal loading.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the small strain formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 3D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 2D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The system shall allow for cohesive zone laws to represent the traction-separation behavior at an interface between two bodies represented by continuum elements in 1D using an elastic traction sepration law, and only compute a normal gap under purely normal loading when using the total Lagrangian formulation.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using an incremental material.
- The CZMInterfaceKernelTotalLagrangian should properly account for large area changes and interface rotations when using a total strain material.
Specification(s): czm_framework/jacobian_small_strain, czm_framework/jacobian_total_lagrangian, czm_framework/small_strain_incremental, czm_framework/total_lagrangian_incremental, czm_framework/multiple_action_and_materials, czm_framework/multiple_action_different_strain, czm_framework/czm_multiple_action_overlapping_boundary, czm_framework/multiple_action_common_outputs, czm_framework/czm_multiple_action_additional_outputs_on_different_block, czm_framework/multiple_action_differnt_outputs_orders_on_different_block, czm_framework/action_3D_small_strain_normal, czm_framework/action_2D_small_strain_normal, czm_framework/action_1D_small_strain_normal, czm_framework/action_3D_total_lagrangian_normal, czm_framework/action_2D_total_lagrangian_normal, czm_framework/action_1D_total_lagrangian_normal, czm_framework/czm_incremental_stretch_rotate_total_lagrangian, czm_framework/czm_total_stretch_rotate_total_lagrangian
Design: PureElasticTractionSeparationCZMComputeDisplacementJumpSmallStrainCZMComputeGlobalTractionSmallStrainCZM InterfaceKernelSmallStrainCZMComputeDisplacementJumpTotalLagrangianCZMComputeGlobalTractionTotalLagrangianCZMInterfaceKernelTotalLagrangian
Issue(s): #11546#14527#17156#18611
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiffExodiff
- tensor_mechanics: Bilinear mixed mode traction separation law
- 2.33.2The system shall be able to model decohesion of composites using cohesive zone model
- under mode I loading.
- under mode I loading with scaled normal strength.
- under mode II loading.
- under mode I loading by lagging the seperation state.
- under mode I loading with power law propagation criterion.
Specification(s): bilinear_mixed_mode/normal, bilinear_mixed_mode/scale_strength_normal, bilinear_mixed_mode/shear, bilinear_mixed_mode/normal_lag, bilinear_mixed_mode/normal_power_law
Design: Bilinear mixed mode traction separation law
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: SalehaniIrani 3D Coupled Traction separation law
- 2.33.3The system shall be able to use the small strain and total lagrangian cohesive zone model formulation, demonstrate an exact jacobian, and use the master action to simplify input an doutput and provide the correct results
- The system shall converge quadratically when using the handcoded Jacobian of the 3DC traction separation model
- The 3DC traction separation shall produce only a normal traction when a normal displacement jump is applied.
- The 3DC traction separation shall produce only a shear traction y when a only a displacement jump along y is applied.
- The 3DC traction separation shall produce only a shear traction z when a only a displacement jump along z is applied.
Specification(s): material_3DC/jacobian, material_3DC/normal_load, material_3DC/shear_load_y, material_3DC/shear_load_z
Design: SalehaniIrani 3D Coupled Traction separation law
Collection(s): FUNCTIONAL
Type(s): CSVDiffExodiff
- tensor_mechanics: Compute Multiple Inelastic Stress
- 2.34.1MOOSE tensor mechanics module shall solve a combined creep and plasticity 1-d bar problem.
Specification(s): combined
Design: Compute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.34.2MOOSE tensor mechanics module shall solve a combined creep and plasticity 1-d bar problem with a non-zero start time.
Specification(s): combined_start_time
Design: Compute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.34.3MOOSE tensor mechanics module shall solve a combined creep and plasticity 3D cube problem with a time-varying pressure BC.
Specification(s): stress_prescribed
Design: Compute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.34.4MOOSE tensor mechanics module shall solve a combined creep and plasticity 3D cube problem with a constant displacement BC and stress relaxation.
Specification(s): stress_relaxation
Design: Compute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.1The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation.
Specification(s): isotropic_plasticity_incremental
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.2The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation while prescribing a base name for the isotropic plasticity material properties.
Specification(s): isotropic_plasticity_incremental_base_name
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.3The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation and using the b-bar element volume correction.
Specification(s): isotropic_plasticity_incremental_Bbar
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.4The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the finite incremental strain formulation.
Specification(s): isotropic_plasticity_finite
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.5The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the finite incremental strain formulation and using the b-bar element volume correction.
Specification(s): isotropic_plasticity_finite_Bbar
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.12The system shall calculate, with J2 isotropic plasticity, the transient stress eigenvalues with stationary eigenvectors verification test from K. Jamojjala, R. Brannon, A. Sadeghirad, J. Guilkey, Verification tests in solid mechanics, Engineering with Computers, Vol 31., p. 193-213.
Specification(s): affine_plasticity
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.91.1The system shall calculate the effect of damage on the stress of a elastic material.
Specification(s): scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.2The system shall calculate the effect of damage on the stress of a elastic material when using automatic differentiation.
Specification(s): ad_scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.3The system shall calculate damaged stress based on old damage index.
Specification(s): scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.4The system shall calculate damaged stress based on old damage index when using automatic differentiation.
Specification(s): ad_scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.5The system shall error out when damage index is greater than 1.
Specification(s): scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.6The system shall error out when damage index is greater than 1 also when using automatic differentiation.
Specification(s): ad_scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.7The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress
Specification(s): scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.8The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress when using automatic differentiation
Specification(s): ad_scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.9The system shall calculate the maximum value of the damage index comparing different damage models.
Specification(s): combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.10The system shall calculate the effective damage index from different damage models.
Specification(s): combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.11The system shall calculate the maximum value of the damage index comparing different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.12The system shall calculate the effective damage index from different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.13The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the creep or plastic deformation.
Specification(s): scalar_damage_material_inelastic
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.14The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation.
Specification(s): scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.15The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation with automatic differentiation.
Specification(s): ad_scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.16The system shall provide a meaningful error if the user selects a material model that is not recognized by the automatic differentiation multiple stress object.
Specification(s): multiple_inelastic_bad_damage_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #20722
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Coupled Pressure BC
- 2.35.1The system shall allow to apply a pressure boundary condition from a variable
Specification(s): coupled_pressure
Design: Coupled Pressure BC
Issue(s): #11558
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Recompute Iterations on the Effective Plastic Strain Increment
- 2.37.1The system shall compute the proper stress update using the radial return isotropic power law creep model.
Specification(s): ten
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.37.2The system shall compute the proper stress update using multiple radial return isotropic power law creep models where one of the models returns zero.
Specification(s): zero
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.37.3The system shall compute the sum of multiple stress updates using multiple radial return isotropic power law creep models.
Specification(s): sum
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.37.4The system shall support the cycling of multiple creep models when computing stress updates.
Specification(s): cycle
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.37.5The system shall produce the correct Jacobians for radial return isotropic power law creep models.
Specification(s): ten_jacobian
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): AnalyzeJacobian
- 2.37.6The system shall produce the correct Jacobians for radial return isotropic power law creep models when one of the models returns zero.
Specification(s): zero_jacobian
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): AnalyzeJacobian
- 2.37.7The system shall produce the correct Jacobians for summed radial return isotropic power law creep models.
Specification(s): sum_jacobian
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): AnalyzeJacobian
- 2.37.8The systam shall produce the correct Jacobians for cyclic creep model evaluation.
Specification(s): cycle_jacobian
Design: Recompute Iterations on the Effective Plastic Strain Increment
Issue(s): #13232
Collection(s): FUNCTIONAL
Type(s): AnalyzeJacobian
- tensor_mechanics: Critical Time Step Postprocessor
- 2.38.1The system shall correctly compute the critical time step for a solid with:
- uniform properties and
- variable properties.
Specification(s): crit_time_solid/uniform, crit_time_solid/variable
Design: Critical Time Step Postprocessor
Issue(s): #13975
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.38.2The system shall correctly compute the critical time step for a beam.
Specification(s): timoshenko_smallstrain_critstep
Design: Critical Time Step Postprocessor
Issue(s): #13975
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.38.3The system shall produce an error if the input elasticity tensor is non-isotropic.
Specification(s): except1
Design: Critical Time Step Postprocessor
Issue(s): #13975
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Crystal Plasticity HCP Dislocation Slip Beyerlein Update
- 2.39.1The model for HCP crystal plasticity, using the Beyerlein and Tome (2008) constitutive model, shall:
- compute the slip system strength and resolved applied shear stress for the prismatic<a> and pyramidal<c+a> slip systems when loaded along the c-axis;
- evolve the forest dislocation and substructure densities on prismatic<a> slip planes when loaded in an appropriate orientation;
- evolve the forest dislocation densities on pyramidal <c+a> slip planes and the substructure density when the crystal is loaded in an appropriate orientation.
- evolve the forest dislocation densities on basal <a> slip planes when the crystal is loaded in an appropriate orientation.
- prevent the calculation of a negative substructure density increment.
- prevent the calculation of a negative total forest density.
- ensure the user specifies a number of the slip systems per mode which is equal to the number of modes;
- ensure the user specifies an equal total number of slip systems and the sum of the different slip mode systems;
- ensure the user specifies a number of burgers vectors per mode that is equal to the number of modes;
- ensure the user specifies a number of slip generation coefficient per mode that is equal to the number of modes;
- ensure the user specifies a size of slip activation energy per mode that is equal to the specified number of modes;
- ensure the user specifies a size of slip energy proportionality factor per mode that is equal to the specified number of modes;
- ensure the user specifies a size of effective shear modulus per mode that is equal to the specified number of modes;
- ensure the user specifies a size of substructure generation rate coefficient per mode that is equal to the specified number of modes;
- ensure the user specifies a size of Hall-Petch like coefficient per mode that is equal to the specified number of modes;
- ensure the user specifies a size of lattice friction values per mode that is equal to the specified number of modes;
Specification(s): constitutive_model/update_method_hcp_aprismatic_capyramidal, constitutive_model/update_method_hcp_aprismatic_active, constitutive_model/update_method_hcp_capyramidal_active, constitutive_model/update_method_hcp_basal_active, constitutive_model/update_method_hcp_no_substructure, constitutive_model/update_method_hcp_no_negative_aprismatic, constitutive_model/update_method_hcp_size_slip_modes, constitutive_model/update_method_hcp_sum_slip_modes_vs_systems, constitutive_model/update_method_hcp_size_burgers_vectors, constitutive_model/update_method_hcp_size_slip_generation, constitutive_model/update_method_hcp_size_activation_energy, constitutive_model/update_method_hcp_size_proportionality_factor, constitutive_model/update_method_hcp_size_shear_modulus, constitutive_model/update_method_hcp_size_substructure_rate, constitutive_model/update_method_hcp_size_hall_petch, constitutive_model/update_method_hcp_size_lattice_friction
Design: Crystal Plasticity HCP Dislocation Slip Beyerlein Update
Issue(s): #18846
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- 2.39.3The crystal plasticity HCP system shall:
- calculate the Schmid tensor for a set of HCP twin systems given in Miller-Bravais indices and shall calculate a twin volume fraction when using the FCC Kalidindi twinning model with a modified input file.
- compute a plastic velocity gradient that accounts for deformation contributions from both slip and twinning in an HCP crystal.
Specification(s): coupling_demonstration/modified_kalidindi_for_hcp, coupling_demonstration/demonstration_combined_hcp_slip_twins
Design: Compute Multiple Crystal Plasticity StressCrystal Plasticity HCP Dislocation Slip Beyerlein UpdateCrystalPlasticityTwinningKalidindiUpdate
Issue(s): #18846
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Multiple Crystal Plasticity Stress
- 2.39.2The HCP crystal plasticity capability shall:
- compute the Schmid tensors and resulting resolved applied shear stress for a non-physical representative set of basal, prismatic, and pyramidal slip systems;
- ensure that the provided lattice parameters match the expectation a = b != c for HCP crystals;
- ensure that eight indices are given for the Miller-Bravais notation for HCP slip systems;
- ensure that the Miller-Bravais basal plane indices sum to zero.
- ensure that the Miller-Bravais indices for the slip direction in the basal plane sum to zero.
- provide warning messages about constitutive model and slip increment convergence issues when the corresponding input file parameter is set to true.
- provide warning messages about constitutive model stress convergence issues with the appropriate input file parameter setting.
Specification(s): base_class_hcp/update_method_hcp_representative_slip_systems, base_class_hcp/update_method_hcp_representative_equal_lattice_parameters, base_class_hcp/update_method_hcp_representative_incorrect_index_numbers, base_class_hcp/update_method_hcp_representative_incorrect_basal_plane, base_class_hcp/update_method_hcp_representative_incorrect_basal_slip_direction, base_class_hcp/update_method_hcp_convergence_issue_flag, base_class_hcp/update_method_hcp_stress_convergence_issue_flag
Design: Compute Multiple Crystal Plasticity Stress
Issue(s): #18846
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- 2.39.3The crystal plasticity HCP system shall:
- calculate the Schmid tensor for a set of HCP twin systems given in Miller-Bravais indices and shall calculate a twin volume fraction when using the FCC Kalidindi twinning model with a modified input file.
- compute a plastic velocity gradient that accounts for deformation contributions from both slip and twinning in an HCP crystal.
Specification(s): coupling_demonstration/modified_kalidindi_for_hcp, coupling_demonstration/demonstration_combined_hcp_slip_twins
Design: Compute Multiple Crystal Plasticity StressCrystal Plasticity HCP Dislocation Slip Beyerlein UpdateCrystalPlasticityTwinningKalidindiUpdate
Issue(s): #18846
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.16The system shall provide a StressUpdate material-based extensible crystal plasticity system
Specification(s): update_model_test
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.17The material-based crystal plasticity model shall compute the lagrangian stress, PK2 stress, and slip for an orientation not aligned with the Cartesian coordinate system.
Specification(s): update_model_011orientation
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.18A constitutive failure shall trigger an exception leading to a cut time step rather than a failed solve using the stress-update based crystal plasticity implementation
Specification(s): exception
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.19The crystal plasticity system shall provide a substepping capability for improved convergence using the stress-update based crystal plasticity implementation
Specification(s): substep
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.23The system shall apply correct boundary condition after timestep being cut during substepping using the stress-update based crystal plasticity implementation
Specification(s): use_substep_dt
Design: Compute Multiple Crystal Plasticity Stress
Issue(s): #17340
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.24The system shall produce correct thermal deformation gradient values with changing temperature
Specification(s): thermal_eigenstrain
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.25The system shall produce correct deformation gradient values for the total and individual eigenstrains
Specification(s): multiple_eigenstrains
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.26The system shall produce correct thermal deformation gradient values with changing temperature under a 011 loading orientation
Specification(s): thermal_eigenstrain_011orientation
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.27The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (111).
Specification(s): update_euler_angle_111_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.28The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (112).
Specification(s): update_euler_angle_112_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.29The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (123).
Specification(s): update_euler_angle_123_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: CrystalPlasticityTwinningKalidindiUpdate
- 2.39.3The crystal plasticity HCP system shall:
- calculate the Schmid tensor for a set of HCP twin systems given in Miller-Bravais indices and shall calculate a twin volume fraction when using the FCC Kalidindi twinning model with a modified input file.
- compute a plastic velocity gradient that accounts for deformation contributions from both slip and twinning in an HCP crystal.
Specification(s): coupling_demonstration/modified_kalidindi_for_hcp, coupling_demonstration/demonstration_combined_hcp_slip_twins
Design: Compute Multiple Crystal Plasticity StressCrystal Plasticity HCP Dislocation Slip Beyerlein UpdateCrystalPlasticityTwinningKalidindiUpdate
Issue(s): #18846
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.30The crystal plasticity model for twin propagation in FCC materials, using the Kalidindi (2001) constiutive model, shall:
- compute the plastic shear due to twinning as a function of the applied shear stress and resistance to twin propagation, the corresponding twin volume fraction per twin system, and the total value of the twin volume fraction across all twin systems.
- compute a non-zero twin volume fraction, and associate plastic shear increment, for only postive applied shear stress values.
- calculate the coplanar twin propogation resistance contribution as a function of the twin volume fractions on coplanar systems alone.
- calculate the contribution to twin propagation resistance from non-coplanar systems as a function of only the twin volume fraction on non-coplanar twin systems.
- set the plastic shear increments due to twinning to zero once the total twin volume fraction limit is reached.
- prevent the accumulation of a total twin volume fraction above the user-defined limit.
- prevent the calculation of a plastic shear increment in excess of the user-defined tolerance value.
Specification(s): constiutive_model/only_twinning_fcc, constiutive_model/check_direction_twin_propagation, constiutive_model/coplanar_twin_hardening, constiutive_model/non_coplanar_twin_hardening, constiutive_model/upper_twin_fraction_limit, constiutive_model/upper_twin_fraction_limit_error, constiutive_model/strain_increment_upper_limit
Design: CrystalPlasticityTwinningKalidindiUpdate
Issue(s): #18846
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- 2.39.31When combined with a dislocation slip constitutive model in a simulation of an FCC material, the Kalidindi (2001) twin propagation model shall:
- compute plastic shear due to both slip and twin propagation when loaded under tension in a 111 orientation.
- compute a near-zero twin volume fraction when loaded under compression in a 111 orientation.
- compute a near-zero volume fraction of twins for all twin system when a 100 oriented crystal is loaded under tension.
- compute both dislocation glide and twin propagation in a 100 oriented crystal loaded under compression.
Specification(s): combined_twinning_slip_models/combined_twinning_slip_111tension, combined_twinning_slip_models/combined_twinning_slip_111compression, combined_twinning_slip_models/combined_twinning_slip_100tension, combined_twinning_slip_models/combined_twinning_slip_100compression
Design: CrystalPlasticityTwinningKalidindiUpdateCrystalPlasticityKalidindiUpdate
Issue(s): #18846
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Finite Strain Crystal Plasticity Slip Rate Residual
- 2.39.4The system shall compute the stress and strain response of a single crystal using the Kalidindi constitutive equation for hardening as a function of slip rate on each slip system.
Specification(s): test_one_elem
Design: Finite Strain Crystal Plasticity Slip Rate Residual
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.5The system shall compute the stress and strain response of a single crystal using the Kalidindi constitutive equation for hardening as a function of slip rate on each slip system with the substepping capability that reduces the intermediate time step size to aid with convergence within the crystal plasticity hardening model.
Specification(s): test_substep
Design: Finite Strain Crystal Plasticity Slip Rate Residual
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.6The system shall compute the stress and strain response of a single crystal using the Kalidindi constitutive equation for hardening as a function of slip rate on each slip system with the bisection line search method within the crystal plasticity hardening model to aid with convergence.
Specification(s): test_with_linesearch
Design: Finite Strain Crystal Plasticity Slip Rate Residual
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Tensor Mechanics Module
- 2.39.7This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.8This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_fileread
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.9This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_user_object
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.10This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_save_euler
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.11This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_read_slip_prop
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.12This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_cutback
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.13This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_substep
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.14This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): test_linesearch
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.15This is a deprecated system that has been replaced by the user object based plasticity and should be removed.
Specification(s): orthotropic_rotation
Design: Tensor Mechanics Module
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: CrystalPlasticityKalidindiUpdate
- 2.39.16The system shall provide a StressUpdate material-based extensible crystal plasticity system
Specification(s): update_model_test
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.17The material-based crystal plasticity model shall compute the lagrangian stress, PK2 stress, and slip for an orientation not aligned with the Cartesian coordinate system.
Specification(s): update_model_011orientation
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.18A constitutive failure shall trigger an exception leading to a cut time step rather than a failed solve using the stress-update based crystal plasticity implementation
Specification(s): exception
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.19The crystal plasticity system shall provide a substepping capability for improved convergence using the stress-update based crystal plasticity implementation
Specification(s): substep
Design: Compute Multiple Crystal Plasticity StressCrystalPlasticityKalidindiUpdate
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.20The crystal plasticity system shall implement a line search capability for accelerated internal Newton solves using the stress-update based crystal plasticity implementation
Specification(s): linesearch
Design: CrystalPlasticityKalidindiUpdate
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.31When combined with a dislocation slip constitutive model in a simulation of an FCC material, the Kalidindi (2001) twin propagation model shall:
- compute plastic shear due to both slip and twin propagation when loaded under tension in a 111 orientation.
- compute a near-zero twin volume fraction when loaded under compression in a 111 orientation.
- compute a near-zero volume fraction of twins for all twin system when a 100 oriented crystal is loaded under tension.
- compute both dislocation glide and twin propagation in a 100 oriented crystal loaded under compression.
Specification(s): combined_twinning_slip_models/combined_twinning_slip_111tension, combined_twinning_slip_models/combined_twinning_slip_111compression, combined_twinning_slip_models/combined_twinning_slip_100tension, combined_twinning_slip_models/combined_twinning_slip_100compression
Design: CrystalPlasticityTwinningKalidindiUpdateCrystalPlasticityKalidindiUpdate
Issue(s): #18846
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeElasticityTensorConstantRotationCP
- 2.39.21The crystal plasticity rotations shall correctly rotate the elasticity tensors at each material point using the stress-update based crystal plasticity implementation
Specification(s): orthotropic_rotation_Cijkl
Design: ComputeElasticityTensorConstantRotationCP
Issue(s): #10629
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Introduction
- 2.39.22The Zienkiewicz-Zhu patch shall calculate the stress components at the nodes, with equivalent results in both serial and parallel simulations, in the stress-update based crystal plasticity implementation
Specification(s): patch_recovery
Design: Introduction
Issue(s): #18721
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.42The Zienkiewicz-Zhu patch shall calculate the stress components at the nodes, with equivalent results in both serial and parallel simulations, in a crystal plasticity finite strain application.
Specification(s): patch_recovery
Design: Introduction
Issue(s): #18721
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.79.1The TensorMechanics module shall be able to construct nodal variables from material properties that are defined at quadrature points.
Specification(s): nodal_patch_recovery
Design: Introduction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.97.1The Zienkiewicz-Zhu patch shall calculate the stress components at the nodes, with equivalent results in both serial and parallel simulations, in a small strain application.
Specification(s): patch_small_strain
Design: Introduction
Issue(s): #11880
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.97.2The Zienkiewicz-Zhu patch shall calculate the stress components at the nodes, with equivalent results in both serial and parallel simulations, in a finite strain application.
Specification(s): patch_finite_strain
Design: Introduction
Issue(s): #18721
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.97.3In areas of high concentration gradients, the Zienkiewicz-Zhu implementation shall recover the specified material property.
Specification(s): stress_concentration
Design: Introduction
Issue(s): #11880
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Crystal Plasticity Thermal Eigenstrain
- 2.39.24The system shall produce correct thermal deformation gradient values with changing temperature
Specification(s): thermal_eigenstrain
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.25The system shall produce correct deformation gradient values for the total and individual eigenstrains
Specification(s): multiple_eigenstrains
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.26The system shall produce correct thermal deformation gradient values with changing temperature under a 011 loading orientation
Specification(s): thermal_eigenstrain_011orientation
Design: Compute Crystal Plasticity Thermal EigenstrainCompute Multiple Crystal Plasticity Stress
Issue(s): #17734
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Updated Euler Angle
- 2.39.27The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (111).
Specification(s): update_euler_angle_111_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.28The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (112).
Specification(s): update_euler_angle_112_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.29The system shall produce correct Euler angles during the crystal plastic simulation for single crystal oriented along (123).
Specification(s): update_euler_angle_123_orientation
Design: Compute Updated Euler AngleCompute Multiple Crystal Plasticity Stress
Issue(s): #19473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: UserObject based Crystal Plasticity System
- 2.39.32The system shall provide a plug-in based extensible crystal plasticity system
Specification(s): test
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.33The material-based crystal plasticity model shall compute the lagrangian stress, PK2 stress, and slip for an orientation not aligned with the Cartesian coordinate system.
Specification(s): user_object_011orientation
Design: UserObject based Crystal Plasticity System
Issue(s): #16064
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.39.34A constitutive failure shall trigger an exception leading to a cut time step rather than a failed solve
Specification(s): exception
Design: UserObject based Crystal Plasticity System
Issue(s): #10133
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.35The crystal plasticity system shall provide a function to read slip system parameters from files
Specification(s): fileread
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.36The crystal plasticity system shall use pluggable user objects to dtermine the plasticity state variable evolution
Specification(s): user_object
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.37The crystal plasticity system shall make local Euler angles at material points available for output
Specification(s): save_euler
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.38The crystal plasticity system shall provide a substepping capability for improved convergence
Specification(s): substep
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.39The crystal plasticity system shall implement a line search capability for accellerated internal Newton solves
Specification(s): linesearch
Design: UserObject based Crystal Plasticity System
Issue(s): #6097
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.39.44The system shall apply correct boundary condition after timestep being cut during substepping
Specification(s): use_substep_dt
Design: UserObject based Crystal Plasticity System
Issue(s): #17340
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Elasticity Tensor CP
- 2.39.40The crystal plasticity rotations shall correctly rotate the elasticity tensors at each material point
Specification(s): orthotropic_rotation_Cijkl
Design: Compute Elasticity Tensor CP
Issue(s): #10629
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Crystal Plasticity State Var Rate Component Voce
- 2.39.41The crystal plasticity system shall provide a plugin user object implementing the Voce hardening law
Specification(s): user_object_Voce_BCC
Design: Crystal Plasticity State Var Rate Component Voce
Issue(s): #11307
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: PropertyReadFile
- 2.39.43The system shall provide an object to read values from a file and map them onto a mesh besed on mesh block IDs
Specification(s): prop_block_read
Design: PropertyReadFile
Issue(s): #4066
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.46.1The system shall provide an object to read values from a file and map them onto a mesh based on mesh element IDs
Specification(s): test_elem
Design: PropertyReadFile
Issue(s): #4066
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.46.2The system shall provide an object to read values from a file and map them onto a mesh based on grain IDs determined by a random Voronoi tessellation
Specification(s): test_grain
Design: PropertyReadFile
Issue(s): #4066
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: DomainIntegral System
- 2.40.1The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D.
Specification(s): test_jthermal
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.40.2The Domain Integral Action shall compute all of the fracture domain integrals including the C integral for problems in 2D.
Specification(s): c_integral_2d
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.40.3The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 2D.
Specification(s): test_iithermal
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.4The interaction integral shall account for the contributions of the gradients of arbitrary eigenstrains in 2D
Specification(s): test_ii_arb_eig_grad
Design: DomainIntegral System
Issue(s): #18804
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.5The DomainIntegralAction shall generate an error if a user specifies the eigenstrain gradient and also request the J integral
Specification(s): test_ii_arb_eig_grad_err_jint
Design: DomainIntegral System
Issue(s): #18804
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.40.6The DomainIntegralAction shall generate an error if a user specifies the temperature and also provides the eigenstrain_gradient
Specification(s): test_ii_arb_eig_grad_err_temp
Design: DomainIntegral System
Issue(s): #18804
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.40.7The interaction integral shall account for the contributions of body forces in 2D
Specification(s): test_ii_bf
Design: DomainIntegral System
Issue(s): #18804
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.8The DomainIntegralAction shall generate an error if a user specifies the body force and also request the J integral
Specification(s): test_ii_bf_err_jint
Design: DomainIntegral System
Issue(s): #18804
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.40.9The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in any plane for 2D.
Specification(s): test_iithermal_rot
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.10The Domain Integral Action shall compute all of the fracture domain integrals including the C(t) integral for problems in 2D.
Specification(s): interaction_integral_2d_c
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.40.11The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D using the instantaneous thermal expansion function eigenstrain.
Specification(s): test_jthermal_ctefunc
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.12The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D using the mean thermal expansion function eigenstrain.
Specification(s): test_jthermal_mean_ctefunc
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.40.13The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D using the instantaneous thermal expansion function eigenstrain.
Specification(s): test_jthermal_inst_ctefunc
Design: DomainIntegral System
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.1The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 2D.
Specification(s): ii_2d
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.2The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems for all planes in 2D.
Specification(s): ii_2d_rot
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.3The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3d evaluated as 2D.
Specification(s): ii_3d_as_2d
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.4The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D.
Specification(s): ii_3d
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.5The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D while supressing the output of q function values.
Specification(s): ii_3d_noq
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.6The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D at specified points.
Specification(s): ii_3d_points
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.7The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in any plane in 3D.
Specification(s): ii_3d_rot
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.60.8The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 2D while outputting q vlaues.
Specification(s): ii_2d_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.60.9The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in any plane 2D while outputting q values.
Specification(s): ii_2d_rot_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.60.10The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D evaluated as 2D.
Specification(s): ii_3d_as_2d_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.60.11The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D while outputting q values.
Specification(s): ii_3d_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.60.12The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in 3D for specified points, while outputting q values.
Specification(s): ii_3d_points_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.60.13The Domain Integral Action shall compute all of the fracture domain integrals including the interaction integral for problems in any plane in 3D while outputting q values.
Specification(s): ii_3d_rot_chk_q
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.61.1The system shall compute mixed-mode fracture integrals that match values of K fields applied at the boundary of a 3D disk cut on one side by a slit
Specification(s): test
Design: DomainIntegral System
Issue(s): #3705
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.1The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D.
Specification(s): j_2d
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.2The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D using small strain.
Specification(s): j_2d_small_strain
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.3The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D at specified points.
Specification(s): j_2d_points
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.4The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D given a mouth direction.
Specification(s): j_2d_mouth_dir
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.5The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D using the topology type q function.
Specification(s): j_2d_topo_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.6The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D evaluated as a 2D problem.
Specification(s): j_3d_as_2d
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.7The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D evaluated as a 2D problem using the topology type q function.
Specification(s): j_3d_as_2d_topo_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.8The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D.
Specification(s): j_3d
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.9The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D with the q function turned off.
Specification(s): j_3d_noq
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.10The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D with specified points.
Specification(s): j_3d_points
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.11The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D given a crack mouth direction.
Specification(s): j_3d_mouth_dir
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.12The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D given a crack mouth direction and end direction vector.
Specification(s): j_3d_mouth_dir_end_dir_vec
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.13The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D with a topology type q function.
Specification(s): j_3d_topo_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.14The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D evaluated as a 2D problem using the topology type q function.
Specification(s): j_3d_as_2d_topo_q_outq
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.15The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D given a crack mouth direction.
Specification(s): j_3d_mouth_dir_outq
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.16The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D while supressing the output of the q function values.
Specification(s): j_2d_noq
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.66.17The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D while outputting the q function values.
Specification(s): j_2d_chk_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.66.18The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 2D with the topology type q function and outputting the values.
Specification(s): j_2d_topo_chk_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.66.19The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D while supressing the output of the q values.
Specification(s): j_3d_chk_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.66.20The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for problems in 3D with the topology type q function and outputting the values.
Specification(s): j_3d_topo_chk_q
Design: DomainIntegral System
Issue(s): #2814
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.67.1The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for surface breaking elliptical cracks.
Specification(s): j_ellip
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.2The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for surface breaking elliptical cracks using the crack mouth specification.
Specification(s): J_ellip_cm
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.3The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for surface breaking elliptical cracks using the crack mouth specification computing the system Jacobian via automatic differentiation.
Specification(s): J_ellip_cm_ad
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.4The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for surface breaking elliptical cracks with crack face pressure.
Specification(s): j_ellip_cfp
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.5The Domain Integral Action shall compute all of the fracture domain integrals including the J integral for surface breaking elliptical cracks with crack face pressure and crack mouth boundary specified.
Specification(s): J_ellip_cm_cfp
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.6The Domain Integral Action shall compute all of the fracture domain integrals including the C integral for surface breaking elliptical cracks.
Specification(s): c_int_surfbreak_ellip_crack_sym_mm
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.67.7The Domain Integral Action shall compute all of the fracture domain integrals including the C integral for surface breaking elliptical cracks using automatic differentiation.
Specification(s): c_int_surfbreak_ellip_crack_sym_mm_ad
Design: DomainIntegral System
Issue(s): #2717
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.99.1The Domain Integral Action shall compute all of the fracture domain integrals including the T stress for cracks in an infinite plate.
Specification(s): 2d
Design: DomainIntegral System
Issue(s): #4276
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.99.2The Domain Integral Action shall compute all of the fracture domain integrals including the T stress for an elliptical crack in 3D.
Specification(s): 3d
Design: DomainIntegral System
Issue(s): #4276
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Dynamics
- 2.42.1The PresetAcceleration class shall accurately prescribe the acceleration at the given boundary.
Specification(s): acceleration_bc
Design: DynamicsPresetAcceleration
Issue(s): #7642
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.2The PresetAcceleration class shall accurately prescribe the acceleration at the given boundary when the Newmark-Beta time integrator is used to calculate the velocity and acceleration.
Specification(s): acceleration_bc_ti
Design: DynamicsPresetAcceleration
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.4The PresetDisplacement class shall accurately prescribe the displacement at the given boundary.
Specification(s): displacement_bc
Design: DynamicsPresetDisplacement
Issue(s): #7642
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.5The PresetDisplacement class shall accurately prescribe the displacement at the given boundary using the velocity and and acceleration computed using the Newmark-Beta time integrator.
Specification(s): displacement_bc_ti
Design: DynamicsPresetDisplacement
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.6The mechanics system shall accurately conduct a static analysis in a small number of time steps to equilibrate the system under gravity before starting the dynamic analysis.
Specification(s): displacement_bc_gravity
Design: Dynamics
Issue(s): #7642
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.7The mechanics system shall accurately predict the dynamic response of a linear elastic system with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): hht
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.8The mechanics system shall accurately predict the dynamic response of a linear elastic system with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration when using the velocity and acceleration computed using the Newmark-Beta time integrator.
Specification(s): hht_ti
Design: Dynamics
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.9The mechanics system shall accurately predict the dynamic response of a linear elastic system with a constant Rayleigh damping.
Specification(s): newmark
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.10The mechanics system shall accurately predict the dynamic response of a linear elastic system with Rayleigh damping provided as a material property.
Specification(s): newmark_material
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.11The mechanics system shall accurately predict the dynamic response of a linear elastic system using Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): hht
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.12The mechanics system shall accurately predict the dynamic response of a linear elastic system using Hilber-Hughes-Taylor (HHT) time integration when using the dynamic tensor mechanics action.
Specification(s): hht_action
Design: Dynamics
Issue(s): #18388
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.13The mechanics system shall accurately predict the dynamic response of a linear elastic system using Newmark time integration.
Specification(s): newmark
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.14The mechanics system shall accurately predict the dynamic response of a linear elastic system using Newmark time integration and the dynamic tensor mechanics action.
Specification(s): newmark_action
Design: Dynamics
Issue(s): #18388
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.15The mechanics system shall accurately predict the dynamic response of a linear elastic system using Hilber-Hughes-Taylor (HHT) time integration when velocity and acceleration of the system are calculated using the Newmark-Beta time integrator.
Specification(s): hht_ti
Design: Dynamics
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.16The dynamic tensor mechanics action shall support automatic differentiation using the Newmark-Beta time integrator.
Specification(s): ad_newmark_action
Design: Dynamics
Issue(s): #18687
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.17The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): hht
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.18The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with no numerical or structural damping.
Specification(s): newmark
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.19The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration.
Specification(s): rayleigh_hht
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.20The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration when automatic differentiation is used.
Specification(s): rayleigh_hht_ad
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.21The mechanics system shall correctly compute the Jacobian for 1D wave propagation in a linear elastic material with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration when automatic differentiation is used.
Specification(s): rayleigh_hht_ad_jac
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.42.22The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with both Rayleigh damping and numerical damping resulting from Hilber-Hughes-Taylor (HHT) time integration when using the velocity and acceleration computed using the Newmark-Beta time integrator.
Specification(s): rayleigh_hht_ti
Design: Dynamics
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.23The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with Rayleigh damping.
Specification(s): rayleigh_newmark
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.24The mechanics system shall correctly predict 1D wave propagation in a linear elastic material with Rayleigh damping when using the dynamic tensor mechanics master action.
Specification(s): rayleigh_newmark_action
Design: Dynamics
Issue(s): #5559
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: PresetAcceleration
- 2.42.1The PresetAcceleration class shall accurately prescribe the acceleration at the given boundary.
Specification(s): acceleration_bc
Design: DynamicsPresetAcceleration
Issue(s): #7642
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.2The PresetAcceleration class shall accurately prescribe the acceleration at the given boundary when the Newmark-Beta time integrator is used to calculate the velocity and acceleration.
Specification(s): acceleration_bc_ti
Design: DynamicsPresetAcceleration
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: LinearNodalConstraint
- 2.42.3The LinearNodalConstraint class shall constrain the secondary nodes to move as a linear combination of the primary nodes.
Specification(s): linear_nodal_constraint
Design: LinearNodalConstraint
Issue(s): #5783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: PresetDisplacement
- 2.42.4The PresetDisplacement class shall accurately prescribe the displacement at the given boundary.
Specification(s): displacement_bc
Design: DynamicsPresetDisplacement
Issue(s): #7642
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.42.5The PresetDisplacement class shall accurately prescribe the displacement at the given boundary using the velocity and and acceleration computed using the Newmark-Beta time integrator.
Specification(s): displacement_bc_ti
Design: DynamicsPresetDisplacement
Issue(s): #12185
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Composite Elasticity Tensor
- 2.45.1The system shall provide a method for assembling an elasticity tensor from multiple tensor contributions weighted by material properties.
Specification(s): composite
Design: Composite Elasticity Tensor
Issue(s): #5850
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Compute Elasticity Tensor
- 2.45.2The system shall provide a method for rotating a tensor using a rotation matrix.
Specification(s): rotation_matrix_one_rotation
Design: Compute Elasticity Tensor
Issue(s): #16340
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.45.3The system shall provide a method for rotating a tensor using a rotation matrix requiring more than one rotation.
Specification(s): rotation_matrix_two_rotations
Design: Compute Elasticity Tensor
Issue(s): #16340
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.64.4The ComputeElasticityTensor class shall correctly compute the elasticity tensor for an isotropic axisymmetric problem.
Specification(s): axisymmetric_rz
Design: Compute Elasticity Tensor
Issue(s): #4783
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ComputeMultiPlasticityStress
- 2.47.3The ComputeMultiPlasticityStress class shall, when supplied with no plastic models, reduce to and produce the solely elastic stress solution for a finite strain fomulation, using the TensorMechanicsMaster action.
Specification(s): fake_plastic
Design: ComputeMultiPlasticityStressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.47.4The ComputeMultiPlasticityStress class shall, when supplied with no plastic models, reduce to and produce the solely elastic stress solution for a finite strain fomulation, using the volumetric locking correction b-bar formulation.
Specification(s): fake_plastic_Bbar
Design: ComputeMultiPlasticityStressVolumetric Locking Correction
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Stress Divergence
- 2.50.1The system shall track a changing global stress state when a model undergoes rigid body rotation
Specification(s): rotation_test
Design: Stress Divergence
Issue(s): #8422
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.50.2The system shall compute a uniform stress state given a uniform strain state with finite strains
Specification(s): patch_test
Design: Stress Divergence
Issue(s): #12584
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Global Strain
- 2.52.1The globalstrain system shall correctly compute the volume change due to applied stress while still maintaining periodicity in 2D.
Specification(s): test
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.2The globalstrain system shall correctly compute the volume change under uniaxial stress while still maintaining periodicity in all the directions in 3D.
Specification(s): uniaxial
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.3The globalstrain system shall correctly compute the volume change under hydrostratic stress while still maintaining periodicity in all the directions in 3D.
Specification(s): hydrostat
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.4The globalstrain system shall correctly compute the shear deformation due to applied stress while still maintaining periodicity in all the directions in 3D.
Specification(s): shear
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.5The globalstrain system shall correctly compute the deformation behavior in 2D with applied displacement boundary condition in one direction while still maintaining periodicity in the other.
Specification(s): direction
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.6The globalstrain system shall correctly compute the deformation behavior in 3D with applied displacement boundary condition in one direction while still maintaining periodicity in the others.
Specification(s): disp
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.7The globalstrain system shall correctly compute the deformation behavior in 3D with pressure boundary condition in one direction while still maintaining periodicity in the others.
Specification(s): pressure_3D
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.52.8The 'GlobalStrainAction' should set all the objects reqiured for the globalstrain system to correctly compute the deformation behavior maintaining strain periodicity.
Specification(s): action_check
Design: Global Strain
Issue(s): #11314
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Gravity
- 2.53.1The tensor mechanics module shall have the capability of applying a body force term in the stress divergence equilibrium equation that accounts for the force of gravity on a solid object due to its own weight.
Specification(s): gravity_test
Design: Gravity
Issue(s): #4781
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADGravity
- 2.53.2The tensor mechanics module shall be able to reproduce gravity test results of the hand-coded jacobian using automatic differentiation.
Specification(s): ad_gravity_test
Design: ADGravity
Issue(s): #13100
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.53.3The Jacobian for the AD gravity problem shall be perfect
Specification(s): ad_gravity_test-jac
Design: ADGravity
Issue(s): #13100
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: MaterialVectorBodyForce
- 2.53.4The system shall provide a way to apply a vector valued body force density to a volume
Specification(s): material_vector_body_force
Design: MaterialVectorBodyForce
Issue(s): #13100
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: KineticEnergyAux
- 2.53.5The system shall provide a way to compute the system total kinetic energy through the use of auxiliary kernels and postprocessors. This test verifies that a body falls at the right acceleration under the action of gravity and that the computed kinetic energy matches the analytical expression.
Specification(s): block-gravity-kinetic-energy
Design: KineticEnergyAux
Issue(s): #19671
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: AsymptoticExpansionHomogenizationKernel
- 2.54.1The system shall compute homogenized elastic constants using the asymptotic expansion homogenization approach and match values for the so-called long fiber problem
Specification(s): longFiber
Design: AsymptoticExpansionHomogenizationKernel
Issue(s): #6750
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.54.2The system shall compute homogenized elastic constants using the asymptotic expansion homogenization approach and match values for the so-called short fiber problem
Specification(s): shortFiber
Design: AsymptoticExpansionHomogenizationKernel
Issue(s): #6750
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Volume Weighted Weibull
- 2.56.1VolumeWeightedWeibull shall generate a randomly distributed field that approximates the analytic expression for the Weibull distribution when the mesh is uniform and the reference volume is set equal to the element size
Specification(s): test
Design: Volume Weighted Weibull
Issue(s): #10221
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.56.2VolumeWeightedWeibull shall generate a randomly distributed field that approaches the analytic expression for the Weibull distribution when the mesh is uniform and the reference volume is set equal to the element size as the mesh density is increased
Specification(s): test_finer
Design: Volume Weighted Weibull
Issue(s): #10221
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.56.3VolumeWeightedWeibull shall generate a randomly distributed field that approximates the analytic expression for the Weibull distribution when the mesh is uniform, the reference volume is set to a value different from the element size, and the median is adjusted to account for the different reference volume
Specification(s): test_ref_vol
Design: Volume Weighted Weibull
Issue(s): #10221
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: PenaltyInclinedNoDisplacementBC
- 2.57.1The TensorMechanics module shall have the capabilty to enforce inclined boundary conditions on a 2D model using a penalty method.
Specification(s): 2D
Design: PenaltyInclinedNoDisplacementBCInclinedNoDisplacementBC Action
Issue(s): #13128
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.57.2The TensorMechanics module shall have the capabilty to enforce inclined boundary conditions on a 3D model using a penalty method.
Specification(s): 3D
Design: PenaltyInclinedNoDisplacementBCInclinedNoDisplacementBC Action
Issue(s): #13128
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: InclinedNoDisplacementBC Action
- 2.57.1The TensorMechanics module shall have the capabilty to enforce inclined boundary conditions on a 2D model using a penalty method.
Specification(s): 2D
Design: PenaltyInclinedNoDisplacementBCInclinedNoDisplacementBC Action
Issue(s): #13128
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.57.2The TensorMechanics module shall have the capabilty to enforce inclined boundary conditions on a 3D model using a penalty method.
Specification(s): 3D
Design: PenaltyInclinedNoDisplacementBCInclinedNoDisplacementBC Action
Issue(s): #13128
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Inertial Torque
- 2.58.1The tensor mechanics module computes residual for a simplesituation correctly
Specification(s): residual
Design: Inertial Torque
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.58.2The tensor mechanics module computes the ith component ofinertial torque where the only degree of freedom in y
Specification(s): simple
Design: Inertial Torque
Issue(s): #13634
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeEigenstrainFromInitialStress
- 2.59.1TensorMechanics shall allow users to specify initial stresses, but shall error-out with appropriate message if the user does not supply the correct number of functions to define the initial stress tensor
Specification(s): except01
Design: ComputeEigenstrainFromInitialStress
Issue(s): #9749
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.59.2TensorMechanics shall allow users to specify initial stresses, but shall error-out with appropriate message if the user does not supply the correct number of AuxVariables to define the initial stress tensor
Specification(s): except02
Design: ComputeEigenstrainFromInitialStress
Issue(s): #13087
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.59.3TensorMechanics shall allow users to specify initial stresses using Functions
Specification(s): gravity
Design: ComputeEigenstrainFromInitialStress
Issue(s): #9749
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.59.4TensorMechanics shall allow users to specify initial stresses using AuxVariables
Specification(s): gravity_with_aux
Design: ComputeEigenstrainFromInitialStress
Issue(s): #13087
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.59.5TensorMechanics shall allow users to specify initial stresses for problems with Cosserat mechanics
Specification(s): gravity_cosserat
Design: ComputeEigenstrainFromInitialStress
Issue(s): #9749
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.59.6TensorMechanics shall allow users to specify initial stresses for problems with plasticity, and if the initial stresses are inadmissible, the return-map algorithm will be applied, perhaps incrementally, to bring the initial stresses back to the admissible region
Specification(s): mc_tensile
Design: ComputeEigenstrainFromInitialStress
Issue(s): #9749
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Tensor Mechanics Action
- 2.70.1Can run second order problem without stabilization
Specification(s): without_correction
Design: Tensor Mechanics Action
Issue(s): #20281
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.70.2Cannot run second order problem with stabilization
Specification(s): with_correction
Design: Tensor Mechanics Action
Issue(s): #20281
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.70.12Action produces identical results for large deformations/with stabilization
Specification(s): action_large_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.13Action produces identical results for large deformations/no stabilization
Specification(s): action_large_no_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.14Action produces identical results for small deformations/with stabilization
Specification(s): action_small_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.15Action produces identical results for small deformations/no stabilization
Specification(s): action_small_no_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.16Action produces identical results for 1D Cartesian problem
Specification(s): action_1D
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.58Action produces identical results for a 3D, large deformation problem with mixed constraints compared to a case where the components are specified manually.
Specification(s): compare_3d
Design: Tensor Mechanics Action
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.59Action produces identical results for a 2D, small deformation problem with mixed constraints compared to a case where the components are specific manually.
Specification(s): compare_2d
Design: Tensor Mechanics Action
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.100Action produces identical results for large deformations/with stabilization
Specification(s): action_large_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.101Action produces identical results for large deformations/no stabilization
Specification(s): action_large_no_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.102Action produces identical results for small deformations/with stabilization
Specification(s): action_small_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.103Action produces identical results for small deformations/no stabilization
Specification(s): action_small_no_stab
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.104Action produces identical results for 1D Cartesian problem
Specification(s): action_1D
Design: Tensor Mechanics Action
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ComputeStVenantKirchhoffStress
- 2.70.3Throw an error if you do not provide an isotropic tensor to ComputeStVenantKirchhoffStress
Specification(s): stvenantkirchhoff
Design: ComputeStVenantKirchhoffStress
Issue(s): #17472
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.70.5Correct Jacobian coming from the material model for nonlinear kinematics with relative error less than 1e-4
Specification(s): pk_stvenant
Design: ComputeStVenantKirchhoffStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.6Correct Jacobian coming from the material model for linear kinematics with relative error less than 1e-4
Specification(s): pk_stvenant_small
Design: ComputeStVenantKirchhoffStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.10Stress matches exact solution (xx=1.6144e3, rest zero)
Specification(s): stvenantkirchhoff
Design: ComputeStVenantKirchhoffStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeLagrangianLinearElasticStress
- 2.70.4Correct Jacobian coming from the material model
Specification(s): cauchy_linear
Design: ComputeLagrangianLinearElasticStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.9Stress matches elastic solution (xx=1e4, rest zero)
Specification(s): cauchy-elastic
Design: ComputeLagrangianLinearElasticStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeNeoHookeanStress
- 2.70.7Correct Jacobian coming from the material model for nonlinear kinematics with relative error less than 1e-4
Specification(s): neohookean
Design: ComputeNeoHookeanStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.8Correct Jacobian coming from the material model for nonlinear kinematics with relative error less than 1e-4
Specification(s): neohookean_small
Design: ComputeNeoHookeanStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.11Stress matches exact analytic solution, rest zero
Specification(s): neohookean
Design: ComputeNeoHookeanStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: TotalLagrangianStressDivergence
- 2.70.17Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.18Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.19Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.20Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.21Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.22Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.23Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.24Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.25Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.26Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.27Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.28Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.29Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.30Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.31Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.32Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.33Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.34Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.35Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.36Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.37Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.38Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.39Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.40Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.41Quadratic convergence in 1D for DirichletBCs, SMP does better than FDP for this problem.
Specification(s): dirichlet
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.42Quadratic convergence in 1D for NeumannBCs, SMP does better than FDP for this problem.
Specification(s): neumann
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.43Quadratic convergence in 2D for DirichletBCs, SMP matches FDP.
Specification(s): dirichlet
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.44Quadratic convergence in 2D for NeumannBCs, SMP matches FDP.
Specification(s): neumann
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.45Quadratic convergence in 3D for DirichletBCs, SMP matches FDP.
Specification(s): dirichlet
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.46Quadratic convergence in 3D for NeumannBCs, SMP matches FDP.
Specification(s): neumann
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.47Quadratic convergence in 3D for PresetBCs on a complicated geometry, SMP matches FDP.
Specification(s): L-large
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.48Quadratic convergence in 3D for PresetBCs on a complicated geometry, SMP matches FDP.
Specification(s): L-small
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.82Small strain uniaxial patch test passes
Specification(s): small
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.83Large strain uniaxial patch test passes
Specification(s): large
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.91System still functions if you supply a base_name
Specification(s): base_name
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.92Stabilized solution matches Cook's solution for stabilized Q4 elements.
Specification(s): cook_small_updated
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.93Stabilized solution matches Cook's solution for stabilized Q4 elements.
Specification(s): cook_large_updated
Design: TotalLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeLagrangianWrappedStress
- 2.70.49Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and an elastic material
Specification(s): elastic_small_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.50Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and an elastic material
Specification(s): elastic_large_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.51Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and an elastic material
Specification(s): elastic_small_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.52Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and an elastic material
Specification(s): elastic_large_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.53Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and an plastic_j2 material
Specification(s): plastic_j2_small_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.54Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and an plastic_j2 material
Specification(s): plastic_j2_large_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.55Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and an plastic_j2 material
Specification(s): plastic_j2_small_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.56Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and an plastic_j2 material
Specification(s): plastic_j2_large_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.57Resulting flow curve matches analytic calculation
Specification(s): flow_curve
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.137Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and an elastic material
Specification(s): elastic_small_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.138Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and an elastic material
Specification(s): elastic_large_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.139Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and an elastic material
Specification(s): elastic_small_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.140Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and an elastic material
Specification(s): elastic_large_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.141Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and an plastic_j2 material
Specification(s): plastic_j2_small_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.142Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and an plastic_j2 material
Specification(s): plastic_j2_large_neither
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.143Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and an plastic_j2 material
Specification(s): plastic_j2_small_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.144Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and an plastic_j2 material
Specification(s): plastic_j2_large_right
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.145Resulting flow curve matches analytic calculation
Specification(s): flow_curve
Design: ComputeLagrangianWrappedStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: HomogenizationConstraintScalarKernel
- 2.70.60Jacobian is exact with rtol 1e-7 for small deformations, imposed strains, and no stabilization
Specification(s): sd-strain_no_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.61Jacobian is exact with rtol 1e-7 for small deformations, imposed stresses, and no stabilization
Specification(s): sd-stress_no_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.62Jacobian is exact with rtol 1e-7 for large deformations, imposed strains, and no stabilization
Specification(s): ld-strain_no_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.63Jacobian is exact with rtol 1e-7 for large deformations, imposed stresses, and no stabilization
Specification(s): ld-stress_no_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.64Jacobian is exact with rtol 1e-7 for small deformations, imposed strains, and stabilization on
Specification(s): sd-strain_right_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.65Jacobian is exact with rtol 1e-7 for small deformations, imposed stresses, and stabilization on
Specification(s): sd-stress_right_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.66Jacobian is exact with rtol 1e-6 for large deformations, imposed strains, and stabilization on
Specification(s): ld-strain_right_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.67Jacobian is exact with rtol 1e-7 for large deformations, imposed stresses, and stabilization on
Specification(s): ld-stress_right_stab
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.68Strain field hits the targets in 1D
Specification(s): 1d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.69Stress field hits the targets in 1D
Specification(s): 1d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.70Strain field hits the targets in 2D
Specification(s): 2d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.71Stress field hits the targets in 2D
Specification(s): 2d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.72Strain field hits the targets in 3D
Specification(s): 3d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.73Stress field hits the targets in 3D
Specification(s): 3d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.74Strain field hits the targets in 1D
Specification(s): 1d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.75Stress field hits the targets in 1D
Specification(s): 1d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.76Strain field hits the targets in 2D
Specification(s): 2d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.77Stress field hits the targets in 2D
Specification(s): 2d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.78Mixed stress and strain field hits the targets in 2D
Specification(s): 2d-mixed
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.79Strain field hits the targets in 3D
Specification(s): 3d-strain
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.80Stress field hits the targets in 3D
Specification(s): 3d-stress
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.81Mixed stress and strain field hits the targets in 3D
Specification(s): 3d-mixed
Design: HomogenizationConstraintScalarKernel
Issue(s): #17473
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeLagrangianObjectiveStress
- 2.70.84Classical Jaumann response to pure shear matches known solution
Specification(s): jaumann_shear
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.85Classical Truesdell response to pure shear matches known solution
Specification(s): truesdell_shear
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.86Treusdell tangent is exact within rtol of 1e-7
Specification(s): truesdell_jacobian
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.87Jaumann tangent is exact within rtol of 1e-7
Specification(s): jaumann_jacobian
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.88Stresses are being computed on the deformed volume
Specification(s): area_change
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.89Stress state correctly rotates from step 10 to the final step
Specification(s): rotate_stresses
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.90Classical demonstration that the shear stress/strain response remains linear for a Truesdell rate.
Specification(s): truesdell
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.148Stresses are being computed on the deformed volume
Specification(s): area_change
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.149Stress state correctly rotates from step 10 to the final step
Specification(s): rotate_stresses
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.150Classical demonstration that the shear stress/strain response remains linear for a Truesdell rate.
Specification(s): truesdell
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.151System still functions correctly if you supply a base_name
Specification(s): base_name
Design: ComputeLagrangianObjectiveStress
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: UpdatedLagrangianStressDivergence
- 2.70.94Strains are as-expected (0.1 total, 0 mechanical) for a free expansion
Specification(s): free
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.95Stresses and strain as expected for thermal expansion constrained in one direction
Specification(s): constrained
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.96Jacobian is exact with relative tolerance of 1e-7 for small displacements, no stabilization, including cross-terms
Specification(s): jacobian_small_no_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.97Jacobian is exact with relative tolerance of 1e-7 for large displacements, no stabilization, including cross-terms
Specification(s): jacobian_large_no_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.98Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, including cross-terms
Specification(s): jacobian_small_with_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.99Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, including cross-terms
Specification(s): jacobian_large_with_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.105Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.106Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.107Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.108Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.109Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.110Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.111Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.112Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.113Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.114Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.115Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.116Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.117Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.118Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.119Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.120Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.121Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.122Jacobian is exact with relative tolerance of 1e-7 for small displacements, without stabilization, and Neumann BCs
Specification(s): neumann_small_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.123Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.124Jacobian is exact with relative tolerance of 1e-7 for large displacements, without stabilization, and Neumann BCs
Specification(s): neumann_large_neither
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.125Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.126Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, and Neumann BCs
Specification(s): neumann_small_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.127Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Dirichlet BCs
Specification(s): dirichlet_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.128Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, and Neurmann BCs
Specification(s): neumann_large_right
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.129Quadratic convergence in 1D for DirichletBCs, SMP does better than FDP for this problem.
Specification(s): dirichlet
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.130Quadratic convergence in 1D for NeumannBCs, SMP does better than FDP for this problem.
Specification(s): neumann
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.131Quadratic convergence in 2D for DirichletBCs, SMP matches FDP.
Specification(s): dirichlet
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.132Quadratic convergence in 2D for NeumannBCs, SMP matches FDP.
Specification(s): neumann
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.133Quadratic convergence in 3D for DirichletBCs, SMP matches FDP.
Specification(s): dirichlet
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.134Quadratic convergence in 3D for NeumannBCs, SMP matches FDP.
Specification(s): neumann
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.135Quadratic convergence in 3D for PresetBCs on a complicated geometry for small deformations, SMP matches FDP.
Specification(s): L-large
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.136Quadratic convergence in 3D for PresetBCs on a complicated geometry for large deformations, SMP matches FDP.
Specification(s): L-small
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.146Small strain uniaxial patch test passes
Specification(s): small
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.147Large strain uniaxial patch test passes
Specification(s): large
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.154Strains are as-expected (0.1 total, 0 mechanical) for a free expansion
Specification(s): free
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.155Stresses and strain as expected for thermal expansion constrained in one direction
Specification(s): constrained
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.70.156Jacobian is exact with relative tolerance of 1e-7 for small displacements, no stabilization, including cross-terms
Specification(s): jacobian_small_no_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.157Jacobian is exact with relative tolerance of 1e-7 for large displacements, no stabilization, including cross-terms
Specification(s): jacobian_large_no_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.158Jacobian is exact with relative tolerance of 1e-7 for small displacements, with stabilization, including cross-terms
Specification(s): jacobian_small_with_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.70.159Jacobian is exact with relative tolerance of 1e-7 for large displacements, with stabilization, including cross-terms
Specification(s): jacobian_large_with_stab
Design: UpdatedLagrangianStressDivergence
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: ComputeLagrangianStrain
- 2.70.152Stabilized solution matches Cook's solution for stabilized Q4 elements for small deformations.
Specification(s): cook_small_total
Design: ComputeLagrangianStrain
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.70.153Stabilized solution matches Cook's solution for stabilized Q4 elements for large deformations.
Specification(s): cook_large_total
Design: ComputeLagrangianStrain
Issue(s): #17472
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Line Material Rank Two Sampler
- 2.71.1The system shall allow sampling of material properties derived from rank two tensors along a line and output those quantities via a vectorpostprocessor.
Specification(s): rank_two_sampler
Design: Line Material Rank Two Sampler
Issue(s): #4462
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Line Material Rank Two Scalar Sampler
- 2.71.2The system shall allow sampling of scalar material properties along a line and output those quantities via a vectorpostprocessor.
Specification(s): rank_two_scalar_sampler
Design: Line Material Rank Two Scalar Sampler
Issue(s): #4462
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Material Time Step Postprocessor
- 2.72.1The system shall compute a timestep size that is limited by a power law creep model and a specified maximum inelastic strain increment.
Specification(s): test5a_lim
Design: Material Time Step Postprocessor
Issue(s): #8553
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.2The system shall not impose a limit on the time step during the initial evaluation when the creep limiting time step option is used.
Specification(s): test5a_lim_on_initial
Design: Material Time Step Postprocessor
Issue(s): #10382
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.72.4The ScalarMaterialDamage model shall be capable of informing the material-based time step calculation based on the number of elements changing damage state in a step
Specification(s): elements_damage_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #11662
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.5The MaterialTimeStepPostprocessor model shall be capable of computing a time step based on both the material time step limited by damage evoluation and the number of elements changing damage state in a step
Specification(s): mixed_timestep_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #11662
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.6The MaterialTimeStepPostprocessor shall generate an error if an unknown property is requested with the 'time_step_limit' parameter
Specification(s): elements_damage_limit_unknown_prop
Design: Material Time Step Postprocessor
Issue(s): #11662
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.72.7The MaterialTimeStepPostprocessor shall generate an error if neither the material time step limit nor the elements changed limit is specified.
Specification(s): e
Design: Material Time Step Postprocessor
Issue(s): #11662
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.72.8The system to limit the analysis time step based on material behavior shall correctly function when used with an isotropic plasticity model.
Specification(s): nl1_lim
Design: Material Time Step Postprocessor
Issue(s): #8553
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.9The system to limit the analysis time step based on material behavior shall correctly function when used with an isotropic plasticity model when the MaterialTimeStepPostprocessor is run at initialization.
Specification(s): nl1_lim_on_initial
Design: Material Time Step Postprocessor
Issue(s): #8553
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.72.10The ComputeMultipleInelasticStress model shall compute a time step equal to the maximum real number if no inelastic model is provided
Specification(s): no_inelastic_model_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #13250
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Scalar Material Damage
- 2.72.3The ScalarMaterialDamage model shall be capable of informing the material-based time step calculation based on the damage evolution
Specification(s): scalar_damage_material_limit
Design: Scalar Material Damage
Issue(s): #11662
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.72.4The ScalarMaterialDamage model shall be capable of informing the material-based time step calculation based on the number of elements changing damage state in a step
Specification(s): elements_damage_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #11662
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.5The MaterialTimeStepPostprocessor model shall be capable of computing a time step based on both the material time step limited by damage evoluation and the number of elements changing damage state in a step
Specification(s): mixed_timestep_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #11662
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.72.10The ComputeMultipleInelasticStress model shall compute a time step equal to the maximum real number if no inelastic model is provided
Specification(s): no_inelastic_model_limit
Design: Scalar Material DamageMaterial Time Step Postprocessor
Issue(s): #13250
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.1The system shall calculate the effect of damage on the stress of a elastic material.
Specification(s): scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.2The system shall calculate the effect of damage on the stress of a elastic material when using automatic differentiation.
Specification(s): ad_scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.3The system shall calculate damaged stress based on old damage index.
Specification(s): scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.4The system shall calculate damaged stress based on old damage index when using automatic differentiation.
Specification(s): ad_scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.5The system shall error out when damage index is greater than 1.
Specification(s): scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.6The system shall error out when damage index is greater than 1 also when using automatic differentiation.
Specification(s): ad_scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.7The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress
Specification(s): scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.8The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress when using automatic differentiation
Specification(s): ad_scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.9The system shall calculate the maximum value of the damage index comparing different damage models.
Specification(s): combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.10The system shall calculate the effective damage index from different damage models.
Specification(s): combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.11The system shall calculate the maximum value of the damage index comparing different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.12The system shall calculate the effective damage index from different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.13The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the creep or plastic deformation.
Specification(s): scalar_damage_material_inelastic
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.14The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation.
Specification(s): scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.15The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation with automatic differentiation.
Specification(s): ad_scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.16The system shall provide a meaningful error if the user selects a material model that is not recognized by the automatic differentiation multiple stress object.
Specification(s): multiple_inelastic_bad_damage_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #20722
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: ADMultiplePowerLawCreepStressUpdate
- 2.77.1The AD multiple power law creep must reproduce the results of the AD single power law creep: Reference results.
Specification(s): powerlaw
Design: ADMultiplePowerLawCreepStressUpdate
Issue(s): #18850
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.77.2The AD multiple power law creep must reproduce the results of the AD single power law creep when a single stress increment is provided by the user.
Specification(s): multipowerlaw
Design: ADMultiplePowerLawCreepStressUpdate
Issue(s): #18850
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.77.3The AD multiple power law creep must reproduce the results of the AD single power law creep with multiple stress intervals with same power law material parameters.
Specification(s): multipowerlaw_two_intervals
Design: ADMultiplePowerLawCreepStressUpdate
Issue(s): #18850
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.77.4The AD multiple power law creep must avoid regression for a simple few-element problem whose solution has stress levels encompassing two different sets of power law parameters
Specification(s): multipowerlaw_two_intervals_no_continuity
Design: ADMultiplePowerLawCreepStressUpdate
Issue(s): #18850
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.77.5Stress thresholds must be provided in increasing order, otherwise an error will inform the user of such a requirement.
Specification(s): multipowerlaw_user_input_error
Design: ADMultiplePowerLawCreepStressUpdate
Issue(s): #18850
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Stresses in Tensor Mechanics
- 2.80.1TensorMechanics shall be able to simulate the confined, uniaxial extension of a notched block which has constitutive law described by:
- unsmoothed capped-Mohr-Coulomb plasticity
- smoothed capped-Mohr-Coulomb plasticity, with smoothing performed by the novel MOOSE smoothing method described in Wilkins et al
- unsmoothed Mohr-Coulomb plasticity
- smoothed Mohr-Coulomb plasticity, with smoothing performed by the Abbo et al method
- smoothed Mohr-Coulomb plasticity, with smoothing performed by the novel MOOSE smoothing method described in Wilkins et al, using the cosine smoother
- smoothed Mohr-Coulomb plasticity, with smoothing performed by the novel MOOSE smoothing method described in Wilkins et al, using the poly1 smoother
- smoothed Mohr-Coulomb plasticity, with smoothing performed by the novel MOOSE smoothing method described in Wilkins et al, using the poly2 smoother
- smoothed Mohr-Coulomb plasticity, with smoothing performed by the novel MOOSE smoothing method described in Wilkins et al, using the poly3 smoother
Specification(s): confined_uniaxial/cmc_planar, confined_uniaxial/cmc_smooth, confined_uniaxial/biaxial_planar, confined_uniaxial/biaxial_abbo, confined_uniaxial/biaxial_smooth_cos, confined_uniaxial/biaxial_smooth_poly1, confined_uniaxial/biaxial_smooth_poly2, confined_uniaxial/biaxial_smooth_poly3
Design: Stresses in Tensor Mechanics
Issue(s): #13766
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.102.1The mechanics system shall correctly compute the jacobian for 3D problems using small strain.
Specification(s): smallstrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.2The mechanics system shall correctly compute the jacobian for 3D problems using incremental small strain.
Specification(s): incrementalstrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.3The mechanics system shall correctly compute the jacobian for 3D problems using finite strain.
Specification(s): finitestrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.7The mechanics system shall correctly compute the jacobian for RZ problems using small strain.
Specification(s): smallstrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.8The mechanics system shall correctly compute the jacobian for RZ problems using incremental small strain.
Specification(s): incrementalstrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.9The mechanics system shall correctly compute the jacobian for RZ problems using finite strain.
Specification(s): finitestrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.13The mechanics system shall correctly compute the jacobian for planestrain problems using small strain.
Specification(s): smallplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.14The mechanics system shall correctly compute the jacobian for planestrain problems using incremental small strain.
Specification(s): incrementalplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.15The mechanics system shall correctly compute the jacobian for planestrain problems using finite strain.
Specification(s): finiteplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.19The mechanics system shall correctly compute the jacobian for spherical problems using small strain.
Specification(s): smallstrain_spherical
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.20The mechanics system shall correctly compute the jacobian for spherical problems using small, incremental strain.
Specification(s): incrementalstrain_spherical
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: WeakPlaneStress
- 2.82.1The system shall compute the correct Jacobian for plane stress conditions
Specification(s): weak_plane_stress_elastic_jacobian
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.82.2The system shall compute the correct Jacobian for plane stress conditions
Specification(s): ad_weak_plane_stress_elastic_jacobian
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.82.3The system shall compute plane stress conditions with small strains with input provided using the Master action
Specification(s): weak_plane_stress_small
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.4The system shall compute plane stress conditions with small strains
Specification(s): ad_weak_plane_stress_small
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.5The system shall compute plane stress conditions with incremental strains with input provided using the Master action
Specification(s): weak_plane_stress_incremental
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.6The system shall compute plane stress conditions with incremental strains with input provided using the Master action
Specification(s): ad_weak_plane_stress_incremental
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.7The system shall compute plane stress conditions with finite strains with input provided using the Master action
Specification(s): weak_plane_stress_finite
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.8The system shall compute plane stress conditions with finite strains with input provided using the Master action
Specification(s): ad_weak_plane_stress_finite
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.82.9The system shall compute the response of a 3D cube in uniaxial tension with finite strain to provide a benchmark for a 2D plane stress, finite strain model
Specification(s): 3D_finite_tension_pull
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.82.10The system shall compute the response of a cube in uniaxial tension using a 2D plane stress, finite strain model, and produce the same result as a 3D model
Specification(s): weak_plane_stress_finite_tension_pull
Design: WeakPlaneStress
Issue(s): #7902
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: PorosityFromStrain
- 2.84.1The system shall compute a Porosity material property from a strain tensor
- using traditional materials.
- using automatic differentiation materials.
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.84.2The system shall handle a negative calculated porosity computed from a strain tensor
- by setting the porosity to zero.
- by setting the porosity to the initial condition.
- by throwing an exception.
Specification(s): negative/zero, negative/initial, negative/exception
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- 2.84.3The system shall handle a nan calcualted porosity computed from a strain tensor
- by throwing an exception.
Specification(s): nan/exception
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: ADPorosityFromStrain
- 2.84.1The system shall compute a Porosity material property from a strain tensor
- using traditional materials.
- using automatic differentiation materials.
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.84.2The system shall handle a negative calculated porosity computed from a strain tensor
- by setting the porosity to zero.
- by setting the porosity to the initial condition.
- by throwing an exception.
Specification(s): negative/zero, negative/initial, negative/exception
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionCSVDiff
- 2.84.3The system shall handle a nan calcualted porosity computed from a strain tensor
- by throwing an exception.
Specification(s): nan/exception
Design: PorosityFromStrainADPorosityFromStrain
Issue(s): #15974
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Side Reaction Postprocessor
- 2.85.1The system shall be able to compute the force on a sideset.
Specification(s): sideset_force
Design: Side Reaction Postprocessor
Issue(s): #15163
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Material Tensor Average
- 2.85.2The system shall be able to compute the volume average of rank two tensor component.
Specification(s): material_tensor_avg_test
Design: Material Tensor Average
Issue(s): #15424
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.85.3The system shall be able to compute the volume average of rank two tensor component, which was computed using automatic differentiation.
Specification(s): material_tensor_avg_AD_test
Design: Material Tensor Average
Issue(s): #15424
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: MooseException
- 2.86.1The system shall gracefully allow exceptions from the radial return mapping algorithm
- not using automatic differentiation methods.
- using automatic differentiation methods.
Specification(s): exception/non, exception/ad
Design: MooseException
Collection(s): FUNCTIONAL
Type(s): RunApp
- tensor_mechanics: Pressure
- 2.87.3The Pressure boundary condition shall compute the correct Jacobian for a problem in 3D space using hex8 elements.
Specification(s): jacobian_3D_hex8
Design: Pressure
Issue(s): #19657
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.87.4The Pressure boundary condition shall compute the correct Jacobian for a problem in 3D space using hex20 elements.
Specification(s): jacobian_3D_hex20
Design: Pressure
Issue(s): #19657
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.87.5The Pressure boundary condition shall compute the correct Jacobian for a problem in RZ coordinates with quad4 elements.
Specification(s): jacobian_RZ
Design: Pressure
Issue(s): #19657
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.87.6The Pressure boundary condition shall compute the correct Jacobian for a problem in RZ coordinates with quad8 elements.
Specification(s): jacobian_RZ_quad8
Design: Pressure
Issue(s): #19657
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.21The mechanics system shall correctly compute the jacobian for spherical problems using small, incremental strain.
Specification(s): incstrn_pressure_spherical
Design: Pressure
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: RadialDisplacementCylinderAux
- 2.88.1The system shall compute the radial component of displacement for axisymmetric cylindrical models
Specification(s): cylinder_2d_axisymmetric
Design: RadialDisplacementCylinderAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.2The system shall compute the radial component of displacement for 2D Cartesian cylindrical models
Specification(s): cylinder_2d_cartesian
Design: RadialDisplacementCylinderAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.3The system shall compute the radial component of displacement for 3D Cartesian cylindrical models
Specification(s): cylinder_3d_cartesian
Design: RadialDisplacementCylinderAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.8The system shall report an error if "axis_vector" is supplied to RadialDisplacementCylinderAux and the model is not 3D Cartesian
Specification(s): cylinder_2d_axisymmetric_except_1
Design: RadialDisplacementCylinderAux
Issue(s): #7604
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.88.9The system shall report an error if "axis_vector" has length of zero
Specification(s): cylinder_3d_cartesian_except_1
Design: RadialDisplacementCylinderAux
Issue(s): #7604
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: RadialDisplacementSphereAux
- 2.88.4The system shall compute the radial component of displacement for 1D spherical models
Specification(s): sphere_1d_spherical
Design: RadialDisplacementSphereAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.5The system shall compute the radial component of displacement for axisymmetric spherical models
Specification(s): sphere_2d_axisymmetric
Design: RadialDisplacementSphereAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.6The system shall compute the radial component of displacement for 3D Cartesian spherical models
Specification(s): sphere_3d_cartesian
Design: RadialDisplacementSphereAux
Issue(s): #7604
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.88.7The system shall report an error if "origin" is supplied to RadialDisplacementSphereAux when the coordinate system is not Cartesian or axisymmetric
Specification(s): sphere_1d_spherical_except_1
Design: RadialDisplacementSphereAux
Issue(s): #7604
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Isotropic Plasticity Stress Update
- 2.89.1The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation.
Specification(s): isotropic_plasticity_incremental
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.2The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation while prescribing a base name for the isotropic plasticity material properties.
Specification(s): isotropic_plasticity_incremental_base_name
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.3The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the small incremental strain formulation and using the b-bar element volume correction.
Specification(s): isotropic_plasticity_incremental_Bbar
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.4The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the finite incremental strain formulation.
Specification(s): isotropic_plasticity_finite
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.5The system shall compute the J2 isotropic plasticity stress and plastic strain response under tensile loading within the finite incremental strain formulation and using the b-bar element volume correction.
Specification(s): isotropic_plasticity_finite_Bbar
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.89.7The system shall only allow the calculation of a J2 isotropic plasticity stress response with only one but not both of a hardening function or hardening constant specified to define the evolving yield surface.
Specification(s): isotropic_plasticity_error1
Design: Isotropic Plasticity Stress Update
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.89.8The system shall only calculate the J2 isotropic plasticity stress response when either a hardening function or a hardening constant is specified to define the evolving yield surface.
Specification(s): isotropic_plasticity_error2
Design: Isotropic Plasticity Stress Update
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.89.9The system shall only calculate the J2 isotropic plasticity stress response when either a constant yield stress or a yield stress function is specified to define the initial yield surface.
Specification(s): isotropic_plasticity_error3
Design: Isotropic Plasticity Stress Update
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.89.10The system shall return an error if a negative yield stress is supplied when calculating the J2 isotropic plasticity stress response.
Specification(s): isotropic_plasticity_error4
Design: Isotropic Plasticity Stress Update
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.89.11The system shall return an error if anisotropic elasticity tensor is supplied when the J2 isotropic plasticity stress response calculation is requested.
Specification(s): isotropic_plasticity_error5
Design: Isotropic Plasticity Stress Update
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.89.12The system shall calculate, with J2 isotropic plasticity, the transient stress eigenvalues with stationary eigenvectors verification test from K. Jamojjala, R. Brannon, A. Sadeghirad, J. Guilkey, Verification tests in solid mechanics, Engineering with Computers, Vol 31., p. 193-213.
Specification(s): affine_plasticity
Design: Isotropic Plasticity Stress UpdateCompute Multiple Inelastic Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Hyperbolic Viscoplasticity Stress Update
- 2.89.6The system shall compute the hyperbolic visoplastic stress response for a time-dependent linear strain hardening plasticity model in a small incremental strain formulation in a manner equivalent to the ABAQUS result.
Specification(s): uniaxial_viscoplasticity
Design: Hyperbolic Viscoplasticity Stress Update
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: LAROMANCE Stress Update with Automatic Differentiation
- 2.90.1The system shall compute a creep rate based on a reduced order model
- and evolve over time with an good finite difference width.
- and evolve over time with an poor finite difference width with more nonlinear iterations than with a good finite difference width.
- in 3D.
- with units of stress other than Pascal.
- in 2DRz.
- in 2DRz with a model loaded from a JSON data file.
- in isolation (i.e. without a full displacement solve), and match with code-to-code comparison with a small set of input parameters not using AD.
- in isolation (i.e. without a full displacement solve), and match with code-to-code comparison with a large set of input parameters not using AD.
- at the lower temperature limit.
- below the lower temperature limit and extrapolate correctly.
- when substepping is off and the time step size does not guarantee the most accurate results.
- when substepping is off and the time step size guarantees accurate results.
- when substepping is on and the numerical integration error selected by the user guarantees accurate results.
- when substepping is on and the numerical integration error selected by the user guarantees accurate results but substepping settings require a system-wise time step cut because the computed number of substeps exceeds the maximum_number_substeps parameter.
- for a variety of overlapping tiles and two overlapping partitions.
- for a variety of overlapping tiles and two overlapping partitions with a model loaded from a JSON data file.
- for a variety of overlapping tiles and two overlapping partitions with a model loaded from a JSON data file relative to the input.
- for a variety of overlapping tiles and two overlapping partitions, and be able to export the model data to a JSON file.
Specification(s): rom/3tile_strain, rom/3tile_strain_small_fd, rom/3d, rom/3d_MPA, rom/2drz, rom/2drz_json, rom/nonad_verification, rom/nonad_verification_heavy, rom/lower_limit, rom/lower_limit_extrapolated, rom/creep_ramp_sub_false, rom/creep_ramp_sub_false_more_steps, rom/creep_ramp_sub_true, rom/creep_ramp_sub_true_exception, rom/3tile, rom/3tile_json, rom/3tile_json_relative, rom/3tile_json_export
Design: LAROMANCE Stress Update with Automatic Differentiation
Issue(s): #14046#16520#17287#20827
Collection(s): FUNCTIONAL
Type(s): CSVDiffJSONDiffRunApp
- 2.90.2The system shall compute a creep rate based on a reduced order model using AD
- in 3D.
- with units of stress other than Pascal.
- in 3D and compute a perfect Jacobian.
- in 2DRz.
- in 2DRz and compute a perfect Jacobian.
- in isolation (i.e. without a full displacement solve), and match with code-to-code comparison with a small set of input parameters using AD.
- in isolation (i.e. without a full displacement solve), and match with code-to-code comparison with a large set of input parameters using AD.
- at the lower temperature limit.
- below the lower temperature limit and extrapolate correctly.
Specification(s): ADrom/3d, ADrom/3d_MPA, ADrom/3d-jac, ADrom/2drz, ADrom/2drz-jac, ADrom/ad_verification, ADrom/ad_verification_heavy, ADrom/lower_limit, ADrom/lower_limit_extrapolated
Design: LAROMANCE Stress Update with Automatic Differentiation
Issue(s): #14046
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTesterCSVDiff
- tensor_mechanics: Compute Damage Stress
- 2.91.1The system shall calculate the effect of damage on the stress of a elastic material.
Specification(s): scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.2The system shall calculate the effect of damage on the stress of a elastic material when using automatic differentiation.
Specification(s): ad_scalar_damage_material
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.3The system shall calculate damaged stress based on old damage index.
Specification(s): scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.4The system shall calculate damaged stress based on old damage index when using automatic differentiation.
Specification(s): ad_scalar_damage_material_old
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.5The system shall error out when damage index is greater than 1.
Specification(s): scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.6The system shall error out when damage index is greater than 1 also when using automatic differentiation.
Specification(s): ad_scalar_damage_material_out_of_bounds
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.7The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress
Specification(s): scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.8The system shall make sure that the damage model is derived from DamageBase and error out when incompatible damage model is used in conjunction with ComputeDamageStress when using automatic differentiation
Specification(s): ad_scalar_damage_incompatible_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.91.9The system shall calculate the maximum value of the damage index comparing different damage models.
Specification(s): combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.10The system shall calculate the effective damage index from different damage models.
Specification(s): combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.11The system shall calculate the maximum value of the damage index comparing different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_max
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.12The system shall calculate the effective damage index from different damage models when using automatic differentiation.
Specification(s): ad_combined_scalar_damage_mult
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.13The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the creep or plastic deformation.
Specification(s): scalar_damage_material_inelastic
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.14The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation.
Specification(s): scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.15The system shall calculate the effect of damage on the stress of a inelastic material in conjunction with the power law creep deformation with automatic differentiation.
Specification(s): ad_scalar_damage_material_creep_power
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #11041
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.91.16The system shall provide a meaningful error if the user selects a material model that is not recognized by the automatic differentiation multiple stress object.
Specification(s): multiple_inelastic_bad_damage_model
Design: Compute Damage StressScalar Material DamageCompute Multiple Inelastic Stress
Issue(s): #20722
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Shell elements
- 2.92.1The mechanics system shall accurately predict the dynamic behavior of a shell element with clamped-free-free-free conditions when
- the surface is on the XY plane
- the surface is at a 45 deg. angle w.r.t. the Y axis
- the surface is at a 45 deg. angle w.r.t. the Y axis and HHT input is provided
Specification(s): verification_tests/shell_dynamics_bending_moment_free, verification_tests/shell_dynamics_bending_moment_free_orientation_inclined, verification_tests/shell_dynamics_bending_moment_free_orientation_inclined_hht
Design: Shell elements
Issue(s): #15067
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.92.3The mechanics system shall accurately compute the deflection of a cantilever beam when it is modeled using shell elements.
Specification(s): beam_bending
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.92.4The mechanics system shall accurately compute the deflection of a rotated cantilever beam when it is modeled using shell elements.
Specification(s): rotated_beam_bending
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.92.5The mechanics system shall accurately compute the deflection of a cantilever beam when it is modeled using shell elements under large strain and rotations are included.
Specification(s): large_beam_bending
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.92.6The mechanics system shall accurately compute the Jacobian for a small strain quasi-static shell element.
Specification(s): beam_bending_jacobian
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.92.7The mechanics system shall accurately compute the Jacobian for a large strain quasi-static shell element.
Specification(s): large_beam_bending_jacobian
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.92.8The mechanics system shall accurately model the deflection of a simply supported under uniform loading.
Specification(s): plate_bending
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.92.9The mechanics system shall accurately model deflection of a plate with multiple force and moment boundary conditions.
Specification(s): plate_bending2
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.92.10The mechanics system shall accurately model the deflection of a pinched cylinder modeled when it is modeled using shell elements.
Specification(s): pinched_cylinder
Design: Shell elements
Issue(s): #14280
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ADInertialForceShell
- 2.92.2The mechanics system shall accurately predict the dynamic behavior of a shell element.
Specification(s): shell_dynamics
Design: ADInertialForceShell
Issue(s): #15067
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Smeared Cracking Stress
- 2.93.1The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in cartesian coordinates.
Specification(s): cracking
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.2The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in cartesian coordinates using the deprecated input file.
Specification(s): cracking_deprecated
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.3The MOOSE TensorMechanics module shall simulate cracking on a specimen under tension in rz coordinates.
Specification(s): cracking_rz
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.4The MOOSE TensorMechanics module shall simulate cracking while the cracking strength is prescribed by an elemental AuxVariable.
Specification(s): cracking_function
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.5The MOOSE TensorMechanics module shall simulate exponential stress release.
Specification(s): exponential
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.6The MOOSE TensorMechanics module shall simulate exponential stress relase, using the deprecated input file.
Specification(s): exponential_deprecated
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.7The MOOSE TensorMechanics module shall simulate exponential stress relase while using the rz coordinate system.
Specification(s): rz_exponential
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.8The MOOSE TensorMechanics module shall demonstrate softening using the power law for smeared cracking.
Specification(s): power
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.9The MOOSE TensorMechanics module shall demonstrate the prescribed softening laws in three directions, power law (x), exponential (y), and abrupt (z).
Specification(s): multiple_softening
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.10The MOOSE TensorMechanics module shall simulate smeared cracking in the x y and z directions.
Specification(s): xyz
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.11The MOOSE TensorMechanics module shall simulate smeared cracking under plane stress conditions.
Specification(s): plane_stress
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.12The MOOSE TensorMechanics module shall demonstrate that the smeared cracking model correctly handles finite rotation of cracked elements.
Specification(s): cracking_rotation
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.13The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where the crack is prescribed in x.
Specification(s): cracking_rotation_pres_dir_x
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.14The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where the crack is prescribed in z.
Specification(s): cracking_rotation_pres_dir_z
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.93.15The MOOSE TensorMechanics module shall demonstrate the finite rotation of cracked elements where two cracks are prescribed in x and z.
Specification(s): cracking_rotation_pres_dir_xz
Design: Compute Smeared Cracking Stress
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Strain Energy Density
- 2.96.1The system shall be capable of calculating strain energy density incrementally in materials with elastic stress and finite strain.
Specification(s): incr_elas
Design: Strain Energy Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.96.2The system shall be capable of informing a user when they incorrectly choose not to use the incremental strain energy density formulation with an incremental material model.
Specification(s): incr_chk1
Design: Strain Energy Density
Issue(s): #10972
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.96.3The system shall be capable of calculating strain energy density for materials with elastic stress and small strain.
Specification(s): tot_elas
Design: Strain Energy Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.96.4The system shall be capable of informing a user when they incorrectly choose to use the incremental strain energy density formulation in a material utilizing small strain.
Specification(s): tot_chk1
Design: Strain Energy Density
Issue(s): #10972
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.96.5The system shall be capable of calculating strain energy density incrementally in materials with inelastic stress and isotropic plasticity.
Specification(s): incr_elas_plas
Design: Strain Energy Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Strain Energy Rate Density
- 2.96.6The system shall be capable of calculating strain energy rate density with elastic stress and finite strain.
Specification(s): rate_model
Design: Strain Energy Rate Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.96.7The system shall be capable of calculating strain energy rate density when using small strain assumptions.
Specification(s): rate_model_small
Design: Strain Energy Rate Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.96.8The system shall be capable of calculating strain energy rate density when using automatic differentiation and weak plane stress.
Specification(s): ad_rate_model_weak_plane
Design: Strain Energy Rate Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.96.9The system shall be capable of calculating strain energy rate density when using hand-coded Jacobian and weak plane stress.
Specification(s): nonAD_rate_model_weak_plane
Design: Strain Energy Rate Density
Issue(s): #10972
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Radial Return Stress Update with automatic differentaiation
- 2.98.1The system shall report diverged return mapping solve due to large deformation imposed in one step
Specification(s): ad_power_law
Design: Radial Return Stress Update with automatic differentaiation
Issue(s): #14757
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.98.2The system shall converge under large deformation owing to the help of substepping
Specification(s): ad_power_law_substepping
Design: Radial Return Stress Update with automatic differentaiation
Issue(s): #14757
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.98.3The system shall report diverged return mapping solve due to large deformation imposed in one step
Specification(s): power_law
Design: Radial Return Stress Update with automatic differentaiation
Issue(s): #14757
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.98.4The system shall converge under large deformation owing to the help of substepping
Specification(s): power_law_substepping
Design: Radial Return Stress Update with automatic differentaiation
Issue(s): #14757
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.98.5The system shall output verbose information about radial return iterations.
Specification(s): output
Design: Radial Return Stress Update with automatic differentaiation
Issue(s): #14757
Collection(s): FUNCTIONAL
Type(s): RunApp
- tensor_mechanics: Temperature Dependent Hardening Stress Update
- 2.100.1The system shall compute the stress as a function of temperature and plastic strain from user-supplied hardening functions not using automatic differentiation.
Specification(s): test
Design: Temperature Dependent Hardening Stress Update
Issue(s): #7043
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.100.2The system shall compute the stress as a function of temperature and plastic strain from user-supplied hardening functions using automatic differentiation.
Specification(s): ADtest
Design: Temperature Dependent Hardening Stress Update
Issue(s): #18454
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Strain Formulations in Tensor Mechanics
- 2.102.1The mechanics system shall correctly compute the jacobian for 3D problems using small strain.
Specification(s): smallstrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.2The mechanics system shall correctly compute the jacobian for 3D problems using incremental small strain.
Specification(s): incrementalstrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.3The mechanics system shall correctly compute the jacobian for 3D problems using finite strain.
Specification(s): finitestrain_3D
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.7The mechanics system shall correctly compute the jacobian for RZ problems using small strain.
Specification(s): smallstrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.8The mechanics system shall correctly compute the jacobian for RZ problems using incremental small strain.
Specification(s): incrementalstrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.9The mechanics system shall correctly compute the jacobian for RZ problems using finite strain.
Specification(s): finitestrain_RZ
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.13The mechanics system shall correctly compute the jacobian for planestrain problems using small strain.
Specification(s): smallplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.14The mechanics system shall correctly compute the jacobian for planestrain problems using incremental small strain.
Specification(s): incrementalplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.15The mechanics system shall correctly compute the jacobian for planestrain problems using finite strain.
Specification(s): finiteplanestrain
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.19The mechanics system shall correctly compute the jacobian for spherical problems using small strain.
Specification(s): smallstrain_spherical
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.102.20The mechanics system shall correctly compute the jacobian for spherical problems using small, incremental strain.
Specification(s): incrementalstrain_spherical
Design: Strain Formulations in Tensor MechanicsStresses in Tensor Mechanics
Issue(s): #8235
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Compute Thermal Expansion Eigenstrain
- 2.103.1The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion.
Specification(s): constant_expansion_coeff
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #7457
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.2The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion when restarting the simulation.
Specification(s): constant_expansion_coeff_restart
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #7457
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.3The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion with an initial strain due to the difference between the stress free temperature and initial temperature of the material.
Specification(s): constant_expansion_stress_free_temp
Design: Compute Thermal Expansion EigenstrainRank Two Aux
Issue(s): #8909
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.4The tensor mechanics module shall have the capability to combine multiple eigenstrains to correctly calculate an eigenstrain tensor resulting from isotropic thermal expansion.
Specification(s): multiple_thermal_eigenstrains
Design: Compute Thermal Expansion EigenstrainRank Two Aux
Issue(s): #7457
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.5The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion.
Specification(s): ad_constant_expansion_coeff
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #13091
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.6The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion using the previous timestep.
Specification(s): ad_constant_expansion_coeff_old
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #13091
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.7The Jacobian for the AD eigenstrain tensor resulting from isotropic thermal expansion shall be perfect
Specification(s): ad_constant_expansion_coeff-jac
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #13091
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.103.8The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion with an initial strain due to the difference between the stress free temperature and initial temperature of the material.
Specification(s): ad_constant_expansion_stress_free_temp
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #13091
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.9The Jacobian for the AD eigenstrain tensor resulting from isotropic thermal expansion with an initial strain shall be perfect
Specification(s): ad_constant_expansion_stress_free_temp-jac
Design: Compute Thermal Expansion Eigenstrain
Issue(s): #13091
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- tensor_mechanics: Rank Two Aux
- 2.103.3The tensor mechanics module shall have the capability to calculate the eigenstrain tensor resulting from isotropic thermal expansion with an initial strain due to the difference between the stress free temperature and initial temperature of the material.
Specification(s): constant_expansion_stress_free_temp
Design: Compute Thermal Expansion EigenstrainRank Two Aux
Issue(s): #8909
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.103.4The tensor mechanics module shall have the capability to combine multiple eigenstrains to correctly calculate an eigenstrain tensor resulting from isotropic thermal expansion.
Specification(s): multiple_thermal_eigenstrains
Design: Compute Thermal Expansion EigenstrainRank Two Aux
Issue(s): #7457
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Torque
- 2.105.1The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations.
Specification(s): non-ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.105.2The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations with automatic differentiation.
Specification(s): ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: PolarMomentOfInertia
- 2.105.1The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations.
Specification(s): non-ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.105.2The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations with automatic differentiation.
Specification(s): ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: RotationAngle
- 2.105.1The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations.
Specification(s): non-ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.105.2The mechanics system shall provide a way to apply a torque to a boundary for small strain simulations with automatic differentiation.
Specification(s): ad
Design: TorquePolarMomentOfInertiaRotationAngle
Issue(s): #17176
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Torque Reaction
- 2.106.1The system shall compute the torque for an applied deformation at the end of a beam in 2D
Specification(s): torque_reaction_2D
Design: Torque Reaction
Issue(s): #6484
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.106.2The system shall compute the torque for an applied deformation at the end of a beam in 3D
Specification(s): torque_reaction_3D
Design: Torque Reaction
Issue(s): #6484
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.106.3The system shall compute the torque resulting from twisting applied using DisplacementAboutAxis to the end of an elastic cylinder
Specification(s): torque_reaction_cylinder
Design: Torque ReactionDisplacement About Axis
Issue(s): #6484
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: Displacement About Axis
- 2.106.3The system shall compute the torque resulting from twisting applied using DisplacementAboutAxis to the end of an elastic cylinder
Specification(s): torque_reaction_cylinder
Design: Torque ReactionDisplacement About Axis
Issue(s): #6484
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.106.4The system shall provide a boundary condition that applies pure finite rigid body rotation to a surface of an elastic body
Specification(s): disp_about_axis_motion
Design: Displacement About Axis
Issue(s): #15092
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.106.5The system shall provide a boundary condition that applies pure finite rigid body rotation to a surface of an elastic body incrementally
Specification(s): disp_about_axis_motion_incremental
Design: Displacement About Axis
Issue(s): #15388
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.106.6The system shall be able to use disaplcement about axis after applying an arbitraty deformation
Specification(s): disp_about_axis_axial_motion_delayed
Design: Displacement About Axis
Issue(s): #15388
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.106.7The system shall generate an error if the DisplacementAboutAxis boundary condition is applied to a component outside the range applicable for the dimensionality of the model
Specification(s): disp_about_axis_error1
Design: Displacement About Axis
Issue(s): #15092
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.106.8The system shall generate an error if the vector prescribed using the axis_direction parameter in the DisplacementAboutAxis boundary condition has a length of zero
Specification(s): disp_about_axis_error2
Design: Displacement About Axis
Issue(s): #15092
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: LinearElasticTruss
- 2.107.1The mechanics system shall accurately model the axial response of 3D truss elements.
Specification(s): truss_3d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.2The truss element shall work correctly when hex elements are also included in the same input or mesh file.
Specification(s): truss_hex
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.3The mechanics system shall accurately model the static response of a 2D frame modeled using truss elements.
Specification(s): truss_2d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.4The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 3D truss elements.
Specification(s): truss_3d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.5The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using truss and hex elements.
Specification(s): truss_hex_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.6The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 2D truss elements.
Specification(s): truss_2d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.7The LineElementAction shall produce an error if
areais not provided as input for truss elements.Specification(s): action_error_1
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.107.8The LineElementAction shall produce an error if rotational variables are provided as input for truss elements.
Specification(s): action_error_2
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: StressDivergenceTensorsTruss
- 2.107.1The mechanics system shall accurately model the axial response of 3D truss elements.
Specification(s): truss_3d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.2The truss element shall work correctly when hex elements are also included in the same input or mesh file.
Specification(s): truss_hex
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.3The mechanics system shall accurately model the static response of a 2D frame modeled using truss elements.
Specification(s): truss_2d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.4The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 3D truss elements.
Specification(s): truss_3d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.5The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using truss and hex elements.
Specification(s): truss_hex_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.6The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 2D truss elements.
Specification(s): truss_2d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.7The LineElementAction shall produce an error if
areais not provided as input for truss elements.Specification(s): action_error_1
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.107.8The LineElementAction shall produce an error if rotational variables are provided as input for truss elements.
Specification(s): action_error_2
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: LineElement Action
- 2.107.1The mechanics system shall accurately model the axial response of 3D truss elements.
Specification(s): truss_3d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.2The truss element shall work correctly when hex elements are also included in the same input or mesh file.
Specification(s): truss_hex
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.3The mechanics system shall accurately model the static response of a 2D frame modeled using truss elements.
Specification(s): truss_2d
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.4The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 3D truss elements.
Specification(s): truss_3d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.5The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using truss and hex elements.
Specification(s): truss_hex_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.6The LineElementAction shall correctly create the objects required for modeling the response of a mechanics system using 2D truss elements.
Specification(s): truss_2d_action
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.7The LineElementAction shall produce an error if
areais not provided as input for truss elements.Specification(s): action_error_1
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.107.8The LineElementAction shall produce an error if rotational variables are provided as input for truss elements.
Specification(s): action_error_2
Design: LinearElasticTrussStressDivergenceTensorsTrussLineElement Action
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: Plastic Truss
- 2.107.9The system shall correctly model the plastic response of truss elements with a linear hardening model under tension.
Specification(s): tensile
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.10The system shall correctly model the plastic response of truss elements with perfect plasticity under tension.
Specification(s): tensile_nohardening
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.11The system shall correctly model the plastic response of truss elements with a user-defined hardening function model under tension.
Specification(s): tensile_hardeningfn
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.12The system shall correctly model the plastic response of truss elements with a linear hardening model under compression.
Specification(s): compressive
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.13The system shall correctly model the plastic response of truss elements with perfect plasticity under compression.
Specification(s): compressive_nohardening
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.14The system shall correctly model the plastic response of truss elements with a user-defined hardening function model under compression.
Specification(s): compressive_hardeningfn
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.107.15PlasticTruss material should produce error if neither the hardening constant nor a hardening function is provided.
Specification(s): error_nohardening
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.107.16PlasticTruss material should produce error if both hardening constant and hardening function are provided.
Specification(s): error_hardening
Design: Plastic Truss
Issue(s): #6789#2460#10313#14304
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- tensor_mechanics: AbaqusUExternalDB
- 2.108.1The Abaqus UEXTERNALDB interface shall execute the UEXTERNALDB routine at the
- beginning of the simulation.
- beginning of each MOOSE time step.
- end of each MOOSE time step.
- end of the simulation.
Specification(s): execution/initial, execution/timestep_begin, execution/timestep_end, execution/final
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.108.2The Abaqus UEXTERNALDB interface shall be able to pass in a custom Abaqus step number.
Specification(s): step
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.108.3The Abaqus UEXTERNALDB interface shall provide the Abaqus API to obtain the simulation output directory.
Specification(s): getoutdir
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.108.4The Abaqus UEXTERNALDB interface shall provide the Abaqus API to obtain the simulation job name.
Specification(s): getjobname
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.108.5The Abaqus UEXTERNALDB interface shall provide Abaqus compatible message routine supporting the
- info level.
- warning level.
- non-fatal error level.
- fatal error level.
Specification(s): messages/info, messages/warning, messages/non_fatal, messages/error
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunExceptionRunApp
- 2.108.6The Abaqus UEXTERNALDB interface shall provide Abaqus compatible mutex management
- supporting single threaded execution.
- supporting at least 2 threads.
- supporting at least 4 threads.
Specification(s): mutex/single_thread, mutex/two_threads, mutex/four_threads
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.108.7The Abaqus UEXTERNALDB interface shall provide the Abaqus API for accessing shared memory objects
- supporting single threaded execution.
- supporting two threaded execution.
- supporting four threaded execution.
Specification(s): sma_memory/single_thread, sma_memory/two_threads, sma_memory/four_threads
Design: AbaqusUExternalDB
Issue(s): #1
Collection(s): FUNCTIONAL
Type(s): RunApp
- tensor_mechanics: Abaqus UMAT Stress
- 2.109.1The system shall provide an interface to use Abaqus UMAT materials as constitutive models, with support for stateful properties
Specification(s): linear_strain_hardening
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.2The system shall raise an error if a UMAT that requires incremental quantities is being used with a total strain formulation
Specification(s): total_strain_error
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.109.3The system shall provide an interface to use Abaqus UMAT materials written in Fortran77 as constitutive models, with support for finite strain elastic material models
Specification(s): elastic
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.4The system shall provide an interface to use Abaqus UMAT materials written in Fortran77 as constitutive models, with support for small strain elastic material models
Specification(s): elastic_small
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.5The system shall provide an interface to use Abaqus UMAT materials written in C/C++ as constitutive models, with support for finite strain elastic material models
Specification(s): elastic_C
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.6The Abaqus UMAT interface shall produce the same results as the built-in MOOSE material models for finite strain elasticity
Specification(s): elastic_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.7The Abaqus UMAT interface shall produce the same results as the built-in MOOSE material models for small strain elasticity
Specification(s): elastic_small_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.8The system shall provide an interface to use Abaqus UMAT materials as constitutive models, with support for incremental strain elastic material models
Specification(s): elastic_incremental
Design: Abaqus UMAT Stress
Issue(s): #18843
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.9The Abaqus UMAT interface shall produce the same results (stress, strain, displacements) as the built-in MOOSE capabilities for a mechanical problem with an external field (not temperature) affecting material behavior
Specification(s): predef
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.10The system shall avoid regression in a simple mechanical problem where a strain field modifies the stiffness of the material through CompositeElasticityTensor. This test also serves as a reference for UMAT external field verification
Specification(s): predef_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.11The Abaqus UMAT interface shall produce the same results (stress, strain, displacements) as the built-in MOOSE capabilities for a mechanical problem with an external field (not temperature) step increment affecting material behavior
Specification(s): dpredef
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.12The system shall avoid regression in a simple mechanical problem where a real number representing the strain increment modifies the stiffness of the material through CompositeElasticityTensor. This test also serves as a reference for UMAT external field increment verification
Specification(s): dpredef_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.13The Abaqus UMAT interface shall produce the same results (stress, strain, displacements) as the built-in MOOSE capabilities for a mechanical problem with two external fields (not temperature) affecting material behavior
Specification(s): predef_multiple
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.14The system shall avoid regression in a simple mechanical problem where two strain fields modifies the stiffness of the material through CompositeElasticityTensor. This test also serves as a reference for UMAT external field verification
Specification(s): predef_multiple_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.15The Abaqus UMAT interface shall produce the same results (stress, strain, displacements) as the built-in MOOSE capabilities for a mechanical problem with two external material properties affecting material behavior
Specification(s): predef_multiple_mat
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.16The system shall avoid regression in a simple mechanical problem where two strain fields modifies the stiffness of the material through CompositeElasticityTensor. This test also serves as a reference for UMAT external material property verification
Specification(s): predef_multiple_reference_mat
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.17The Abaqus UMAT interface shall pass correct values for STRAN, DSTRAN, TIME, CMNAME, NDI, NSHR, NTENS, COORDS, DROT, CELENT, DFGRD0, DFGRD1, NOEL, NPT, and KINC, when a single element is subjected to axial loading. Values are checked against verified references
Specification(s): predef
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.109.18The Abaqus UMAT interface shall produce the same results (stress, strain, displacements) as the built-in MOOSE capabilities for a mechanical problem with two external fields (not temperature) step increment affecting material behavior and shear deformation
Specification(s): print_shear
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.19The system shall avoid regression in a simple mechanical problem where two strain increments modify the stiffness of the material through CompositeElasticityTensor. This test also serves as a reference for UMAT behavior in the presence of shear deformation.
Specification(s): print_shear_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.20The Abaqus UMAT interface shall pass the correct values for STRAN, DSTRAN, TIME, CMNAME, NDI, NSHR, NTENS, COORDS, DROT, CELENT, DFGRD0, DFGRD1, NOEL, NPT, and KINC, when shear deformation (causing nontrivial rotation kinematics) is present.
Specification(s): print_shear_print
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.109.21The Abaqus UMAT interface shall pass correct values into a C UMAT routine for STRAN, DSTRAN, TIME, CMNAME, NDI, NSHR, NTENS, COORDS, DROT, CELENT, DFGRD0, DFGRD1, NOEL, NPT, and KINC, when a single element is subjected to axial loading. Values are checked against verified references
Specification(s): print_c
Design: Abaqus UMAT Stress
Issue(s): #18237
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.109.22The system shall generate identical numerical results regardless of whether the UMAT interface is written in Fortran or C. Generation of reference results.
Specification(s): print_compare_c
Design: Abaqus UMAT Stress
Issue(s): #18237
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.23The system shall generate identical numerical results regardless of whether the UMAT interface is written in Fortran or C. Verification.
Specification(s): print_compare_f
Design: Abaqus UMAT Stress
Issue(s): #18237
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.24The system shall allow for the correct use of Eigen matrices in C UMAT functions.
Specification(s): print_eigen
Design: Abaqus UMAT Stress
Issue(s): #18237
Collection(s): FUNCTIONAL
Type(s): RunApp
- 2.109.25UMAT shall generate the correct shear deformation and stress when a single element is sheared via a Dirichlet boundary condition on the XY plane with anisotropic shear stiffness; results must coincide with those of MOOSE.
Specification(s): shear_order_umat_umat_x
Design: Abaqus UMAT Stress
Issue(s): #20111
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.26UMAT shall generate the correct shear deformation and stress when a single element is sheared via a Dirichlet boundary condition on the YZ plane with anisotropic shear stiffness; results must coincide with those of MOOSE.
Specification(s): shear_order_umat_umat_z
Design: Abaqus UMAT Stress
Issue(s): #20111
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.27The system shall generate reference results of a sheared finite element on the XY plane.
Specification(s): shear_order_umat_moose_x
Design: Abaqus UMAT Stress
Issue(s): #20111
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.28The system shall generate reference results of a sheared finite element on the YZ plane.
Specification(s): shear_order_umat_moose_z
Design: Abaqus UMAT Stress
Issue(s): #20111
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.29The system shall generate a system Jacobian from the UMAT routines using large strain kinematics that is of the same order as the one generated by MOOSE using Rashid strain incrementation when the shear stiffness is anisotropic.
Specification(s): shear_order_umat_umat_z_jacobian
Design: Abaqus UMAT Stress
Issue(s): #20111
Collection(s): FUNCTIONAL
Type(s): PetscJacobianTester
- 2.109.30The system shall provide an interface to use Abaqus UMAT materials as constitutive models, with support for finite strain elastic material models and temperature dependence
Specification(s): elastic_temperature
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.31The Abaqus UMAT interface shall produce the same results as the built-in MOOSE material models for finite strain elasticity and temperature dependence
Specification(s): elastic_temperature_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.32The system shall provide an interface to use Abaqus UMAT materials as constitutive models, with support for finite strain elastic material models and temperature dependence, include the temperature step increment
Specification(s): elastic_dtemperature
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.33The Abaqus UMAT interface shall produce the same results as the built-in MOOSE material models for finite strain elasticity and temperature dependence, including the temperature step increment
Specification(s): elastic_dtemperature_reference
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.109.34The system shall provide an interface to use Abaqus UMAT materials that allows the user to control the time step increment within the UMAT routine and combine it with MOOSE native time step controls, including cutback and growth factors, and soft terminations.
Specification(s): elastic_timestep
Design: Abaqus UMAT Stress
Issue(s): #14974
Collection(s): FUNCTIONAL
Type(s): Exodiff
- tensor_mechanics: ComputeDeformGradBasedStress
- 2.111.1The ComputeDeformGradBasedStress class shall correctly compute the stress based on the lagrangian strain.
Specification(s): elastic
Design: ComputeDeformGradBasedStress
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.111.2The ComputeDeformGradBasedStress class shall correctly compute the stress from lagrangian strain when volumetric locking correction is used.
Specification(s): elastic_Bbar
Design: ComputeDeformGradBasedStressVolumetric Locking Correction
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: ComputeVolumetricDeformGrad
- 2.111.3The ComputeVolumeDeformGrad and the VolumeDeformGradCorrectedStress classes shall correctly compute the volumetric deformation gradient, total deformation gradient and transform the stress from previous configuration to the current configuration.
Specification(s): interface
Design: ComputeVolumetricDeformGrad
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.111.4The ComputeVolumeDeformGrad and the VolumeDeformGradCorrectedStress classes shall correctly compute the volumetric deformation gradient, total deformation gradient and transform the stress from previous configuration to the current configuration when volumetric locking correction is used.
Specification(s): interface_Bbar
Design: ComputeVolumetricDeformGradVolumeDeformGradCorrectedStressVolumetric Locking Correction
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: VolumeDeformGradCorrectedStress
- 2.111.4The ComputeVolumeDeformGrad and the VolumeDeformGradCorrectedStress classes shall correctly compute the volumetric deformation gradient, total deformation gradient and transform the stress from previous configuration to the current configuration when volumetric locking correction is used.
Specification(s): interface_Bbar
Design: ComputeVolumetricDeformGradVolumeDeformGradCorrectedStressVolumetric Locking Correction
Issue(s): #6604
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: Compute Volumetric Eigenstrain
- 2.112.1The ComputeVolumetricEigenStrainClass shall correctly compute an eigenstrain tensor that results in a solution that exactly recovers the specified volumetric expansion, and the reported volumetric strain computed by RankTwoScalarAux shall match the prescribed volumetric strain.
Specification(s): test
Design: Compute Volumetric EigenstrainRank Two Scalar Aux
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.112.2The volumetric strain computed using RankTwoScalarAux for a unit cube with imposed displacements shall be identical to that obtained by imposing an eigenstrain that causes the same deformation of that model.
Specification(s): test_mechanical
Design: Compute Volumetric EigenstrainRank Two Scalar Aux
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: TensorMechanicsPlasticWeakPlaneShear
- 2.114.1The system shall not allow a weak plane shear friction angle less than the dilation angle.
Specification(s): except1
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.114.2The system shall not allow a zero length transverse direction vector
Specification(s): except2
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.114.4For the case of small deformations the system shall
- return a value of shear of 1 and a normal stress value of 0 when the apex of the shear envelope is (0,2);
- utlize the small smoother parameter under both pure tension and pure shear to solve;
- return the stress state to the yield surface under random loading;
- utilize the cap smoothing functionality under both pure tension and pure shear to solve the simulation.
Specification(s): small_deformations/small1, small_deformations/small2, small_deformations/small3, small_deformations/small4
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.114.5For large deformation cases the system shall
- produce a solution without plasticity after the mesh is rotated by 90 degrees;
- return the stress state to the yield surface under pure tensile loading conditions after the mesh is rotated by 45 degrees;
- return the stress state to the yield surface under pseudo-random loading directions;
- return the stress state to the yield surface under pseudo-random loading while using the cap-tip yeild surface scheme.
Specification(s): large_deformation/large1, large_deformation/large2, large_deformation/large3, large_deformation/large4
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FUNCTIONAL
Type(s): CSVDiffExodiff
- 2.114.6Under small deformation loading selected to induce cohesion hardening the system shall
- with repeated stretch loading;
- for pure tension and then pure shear to map out the yield function;
- with linearly increasing loading and an exponential hardening model;
- with a linearly increasing load and a cubic hardening model.
Specification(s): small_deformation_hardening/small_harden1, small_deformation_hardening/small_harden2, small_deformation_hardening/small_harden3, small_deformation_hardening/small_harden4
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.114.7The system shall return the stress state to the yield surface under random large deformation loads.
Specification(s): large_harden3
Design: TensorMechanicsPlasticWeakPlaneShear
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- tensor_mechanics: TensorMechanicsPlasticWeakPlaneTensile
- 2.115.1The system shall not allow a negative tensile strength value.
Specification(s): except1
Design: TensorMechanicsPlasticWeakPlaneTensile
Collection(s): FAILURE_ANALYSISFUNCTIONAL
Type(s): RunException
- 2.115.2With a single element stretched by 1e-6m, for small deformation, the system shall
- return the stress state to the yield surface when the applied stress is above the yield surface tensile strength;
- return the stress state to the specified vector yield surface;
- not calculate a plastic solution because the applied stress is lower than the tension cutoff for the yield surface.
Specification(s): small_deformation/small1, small_deformation/small1N, small_deformation/small2
Design: TensorMechanicsPlasticWeakPlaneTensile
Collection(s): FUNCTIONAL
Type(s): CSVDiff
- 2.115.3Under large deformation loading the system shall
- calculate a solution without plasticity after the mesh is rotated by 90 degrees;
- return the stress state to the yield surface under pure tensile loading after the mesh is rotated by 45 degrees.
Specification(s): large_deformation/large1, large_deformation/large2
Design: TensorMechanicsPlasticWeakPlaneTensile
Collection(s): FUNCTIONAL
Type(s): Exodiff
- 2.115.4Under small deformation loading selected to induce hardening the system shall
- the deformation shall produce increments of plastic strain in response to incremental loading steps;
- evolve the plastic internal state variable for an exponential hardening model;
- return the stress state to the evolving yield surface when loaded solely in the z-direction for an exponential hardening model;
- return the stress state to the evolving yield surface when loaded solely in the z-direction for an cubic hardening model;
Specification(s): small_deformation_hardening/small_hard1, small_deformation_hardening/small_hard2, small_deformation_hardening/small_hard3, small_deformation_hardening/small_hard_cubic
Design: TensorMechanicsPlasticWeakPlaneTensile
Collection(s): FUNCTIONAL
Type(s): CSVDiff