Two-dimensional spherical indenter (mortar)
A two-dimensional problem with RZ symmetry is used to model the penetration of a spherical indenter into an inelastic base material.
Background
Indentation tests are often used to characterize the behavior of materials at small scales. In this example, we use a spherical indenter driven by a prescribed displacement as a boundary condition. Frictionless contact with a lower-dimensional enforcement (mortar) formulation is employed to drive base material deformation. As a result, a load displacement curve can be obtained.
Creating contact input
Mechanical contact can be enforced on lower-dimensional domains in a weak sense. This type of approach is usually referred to as mortar. To employ this approach, the user can manually build the lower-dimensional subdomains. primary and secondary subdomains are created from mesh sidesets.
[Mesh]
patch_update_strategy = auto
patch_size = 2
partitioner = centroid
centroid_partitioner_direction = y
[simple_mesh]
type = FileMeshGenerator
file = indenter_rz_fine_bigsideset.e
[]
# For NodalVariableValue to work with distributed mesh
allow_renumbering = false
[]
[Functions]
[disp_y]
type = PiecewiseLinear
x = '0. 1.0 2.0 2.6 3.0'
y = '0. -4.5 -5.7 -5.7 -4.0'
[]
[]
[Variables]
[disp_x]
order = FIRST
family = LAGRANGE
block = '1 2'
[]
[disp_y]
order = FIRST
family = LAGRANGE
block = '1 2'
[]
[]
[AuxVariables]
[saved_x]
[]
[saved_y]
[]
[]
[Modules/TensorMechanics/Master]
[all]
add_variables = true
strain = FINITE
block = '1 2'
use_automatic_differentiation = false
generate_output = 'stress_xx stress_xy stress_xz stress_yy stress_zz'
save_in = 'saved_x saved_y'
[]
[]
[BCs]
# Symmetries of the Problem
[symm_x_indenter]
type = DirichletBC
variable = disp_x
boundary = 5
value = 0.0
[]
[symm_x_material]
type = DirichletBC
variable = disp_x
boundary = 9
value = 0.0
[]
# Material should not fly away
[material_base_y]
type = DirichletBC
variable = disp_y
boundary = 8
value = 0.0
[]
# Drive indenter motion
[disp_y]
type = FunctionDirichletBC
variable = disp_y
boundary = 1
function = disp_y
[]
[]
[Contact]
[contact]
secondary = 4
primary = 6
model = frictionless
# Investigate von Mises stress at the edge
correct_edge_dropping = true
formulation = mortar
c_normal = 1e+2
[]
[]
[UserObjects]
[slip_rate_gss]
type = CrystalPlasticitySlipRateGSS
variable_size = 48
slip_sys_file_name = input_slip_sys_bcc48.txt
num_slip_sys_flowrate_props = 2
flowprops = '1 48 0.0001 0.01'
uo_state_var_name = state_var_gss
slip_incr_tol = 10.0
block = 2
[]
[slip_resistance_gss]
type = CrystalPlasticitySlipResistanceGSS
variable_size = 48
uo_state_var_name = state_var_gss
block = 2
[]
[state_var_gss]
type = CrystalPlasticityStateVariable
variable_size = 48
groups = '0 24 48'
group_values = '900 1000' #120
uo_state_var_evol_rate_comp_name = state_var_evol_rate_comp_gss
scale_factor = 1.0
block = 2
[]
[state_var_evol_rate_comp_gss]
type = CrystalPlasticityStateVarRateComponentGSS
variable_size = 48
hprops = '1.4 1000 1200 2.5'
uo_slip_rate_name = slip_rate_gss
uo_state_var_name = state_var_gss
block = 2
[]
[]
[Materials]
[tensor]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1.0e7
poissons_ratio = 0.25
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[crysp]
type = FiniteStrainUObasedCP
block = 2
stol = 1e-2
tan_mod_type = exact
uo_slip_rates = 'slip_rate_gss'
uo_slip_resistances = 'slip_resistance_gss'
uo_state_vars = 'state_var_gss'
uo_state_var_evol_rate_comps = 'state_var_evol_rate_comp_gss'
maximum_substep_iteration = 20
[]
[elasticity_tensor]
type = ComputeElasticityTensorCP
block = 2
C_ijkl = '265190 113650 113650 265190 113650 265190 75769 75769 75760'
fill_method = symmetric9
[]
[]
[Preconditioning]
[SMP]
type = SMP
full = true
[]
[]
[Executioner]
type = Transient
solve_type = 'PJFNK'
petsc_options = '-snes_ksp_ew'
petsc_options_iname = '-pc_type -snes_linesearch_type -pc_factor_shift_type '
'-pc_factor_shift_amount'
petsc_options_value = 'lu basic NONZERO 1e-15'
line_search = 'none'
automatic_scaling = true
nl_abs_tol = 2.0e-07
nl_rel_tol = 2.0e-07
l_max_its = 40
l_abs_tol = 1e-08
l_tol = 1e-08
start_time = 0.0
dt = 0.01
end_time = 3.0 # Executioner
[]
[Postprocessors]
[maxdisp]
type = NodalVariableValue
nodeid = 39
variable = disp_y
[]
[resid_y]
type = NodalSum
variable = saved_y
boundary = 1
[]
[]
[Outputs]
[out]
type = Exodus
elemental_as_nodal = true
[]
perf_graph = true
csv = true
[]
Mortar-based mechanical contact can be defined through the contact action. Here, a more manual, user-driven definition is used.
Fig. 1: Spherical indenter.
For frictionless contact in two dimensions, three blocks need to be defined. First, the NormalNodalLMMechanicalContact constraint is used to enforce the Karush-Kuhn-Tucker contact conditions. Then, NormalMortarMechanicalContact enforces contact constaints in an integral or weak sense in both problem dimensions.
[GlobalParams]
volumetric_locking_correction = true
displacements = 'disp_x disp_y'
[]
[Problem]
coord_type = RZ
type = ReferenceResidualProblem
reference_vector = 'ref'
extra_tag_vectors = 'ref'
[]
[Mesh]
patch_update_strategy = auto
patch_size = 2
partitioner = centroid
centroid_partitioner_direction = y
[simple_mesh]
type = FileMeshGenerator
file = indenter_rz_fine_bigsideset.e
[]
# For NodalVariableValue to work with distributed mesh
allow_renumbering = false
[]
[Functions]
[disp_y]
type = PiecewiseLinear
x = '0. 1.0 2.0 2.6 3.0'
y = '0. -4.5 -5.7 -5.7 -4.0'
[]
[]
[Variables]
[disp_x]
order = FIRST
family = LAGRANGE
block = '1 2'
[]
[disp_y]
order = FIRST
family = LAGRANGE
block = '1 2'
[]
[]
[AuxVariables]
[saved_x]
[]
[saved_y]
[]
[]
[Modules/TensorMechanics/Master]
[all]
add_variables = true
strain = FINITE
block = '1 2'
use_automatic_differentiation = false
generate_output = 'stress_xx stress_xy stress_xz stress_yy stress_zz'
save_in = 'saved_x saved_y'
[]
[]
[BCs]
# Symmetries of the Problem
[symm_x_indenter]
type = DirichletBC
variable = disp_x
boundary = 5
value = 0.0
[]
[symm_x_material]
type = DirichletBC
variable = disp_x
boundary = 9
value = 0.0
[]
# Material should not fly away
[material_base_y]
type = DirichletBC
variable = disp_y
boundary = 8
value = 0.0
[]
# Drive indenter motion
[disp_y]
type = FunctionDirichletBC
variable = disp_y
boundary = 1
function = disp_y
[]
[]
[Contact]
[contact]
secondary = 4
primary = 6
model = frictionless
# Investigate von Mises stress at the edge
correct_edge_dropping = true
formulation = mortar
c_normal = 1e+2
[]
[]
[UserObjects]
[slip_rate_gss]
type = CrystalPlasticitySlipRateGSS
variable_size = 48
slip_sys_file_name = input_slip_sys_bcc48.txt
num_slip_sys_flowrate_props = 2
flowprops = '1 48 0.0001 0.01'
uo_state_var_name = state_var_gss
slip_incr_tol = 10.0
block = 2
[]
[slip_resistance_gss]
type = CrystalPlasticitySlipResistanceGSS
variable_size = 48
uo_state_var_name = state_var_gss
block = 2
[]
[state_var_gss]
type = CrystalPlasticityStateVariable
variable_size = 48
groups = '0 24 48'
group_values = '900 1000' #120
uo_state_var_evol_rate_comp_name = state_var_evol_rate_comp_gss
scale_factor = 1.0
block = 2
[]
[state_var_evol_rate_comp_gss]
type = CrystalPlasticityStateVarRateComponentGSS
variable_size = 48
hprops = '1.4 1000 1200 2.5'
uo_slip_rate_name = slip_rate_gss
uo_state_var_name = state_var_gss
block = 2
[]
[]
[Materials]
[tensor]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1.0e7
poissons_ratio = 0.25
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[crysp]
type = FiniteStrainUObasedCP
block = 2
stol = 1e-2
tan_mod_type = exact
uo_slip_rates = 'slip_rate_gss'
uo_slip_resistances = 'slip_resistance_gss'
uo_state_vars = 'state_var_gss'
uo_state_var_evol_rate_comps = 'state_var_evol_rate_comp_gss'
maximum_substep_iteration = 20
[]
[elasticity_tensor]
type = ComputeElasticityTensorCP
block = 2
C_ijkl = '265190 113650 113650 265190 113650 265190 75769 75769 75760'
fill_method = symmetric9
[]
[]
[Preconditioning]
[SMP]
type = SMP
full = true
[]
[]
[Executioner]
type = Transient
solve_type = 'PJFNK'
petsc_options = '-snes_ksp_ew'
petsc_options_iname = '-pc_type -snes_linesearch_type -pc_factor_shift_type '
'-pc_factor_shift_amount'
petsc_options_value = 'lu basic NONZERO 1e-15'
line_search = 'none'
automatic_scaling = true
nl_abs_tol = 2.0e-07
nl_rel_tol = 2.0e-07
l_max_its = 40
l_abs_tol = 1e-08
l_tol = 1e-08
start_time = 0.0
dt = 0.01
end_time = 3.0 # Executioner
[]
[Postprocessors]
[maxdisp]
type = NodalVariableValue
nodeid = 39
variable = disp_y
[]
[resid_y]
type = NodalSum
variable = saved_y
boundary = 1
[]
[]
[Outputs]
[out]
type = Exodus
elemental_as_nodal = true
[]
perf_graph = true
csv = true
[]
Note that the subdomain blocks had been created in the mesh input using LowerDBlockFromSidesetGenerator.
Mortar enforcement is only available for two-dimensional contact.
Other input
The problem is axisymmetric Compute Axisymmetric RZ Finite Strain and symmetric boundary conditions are used.
Numerical results
The resulting force exerted as material resistance on the indenter may be plotted against the vertical displacement. In this problem, the base material is a monocrystal with body-centered cubic (bcc) unit cell with arbitrary parameters. Platic deformation causes the piling up of the base material's contact surface, as shown in the animation in Fig. 1.
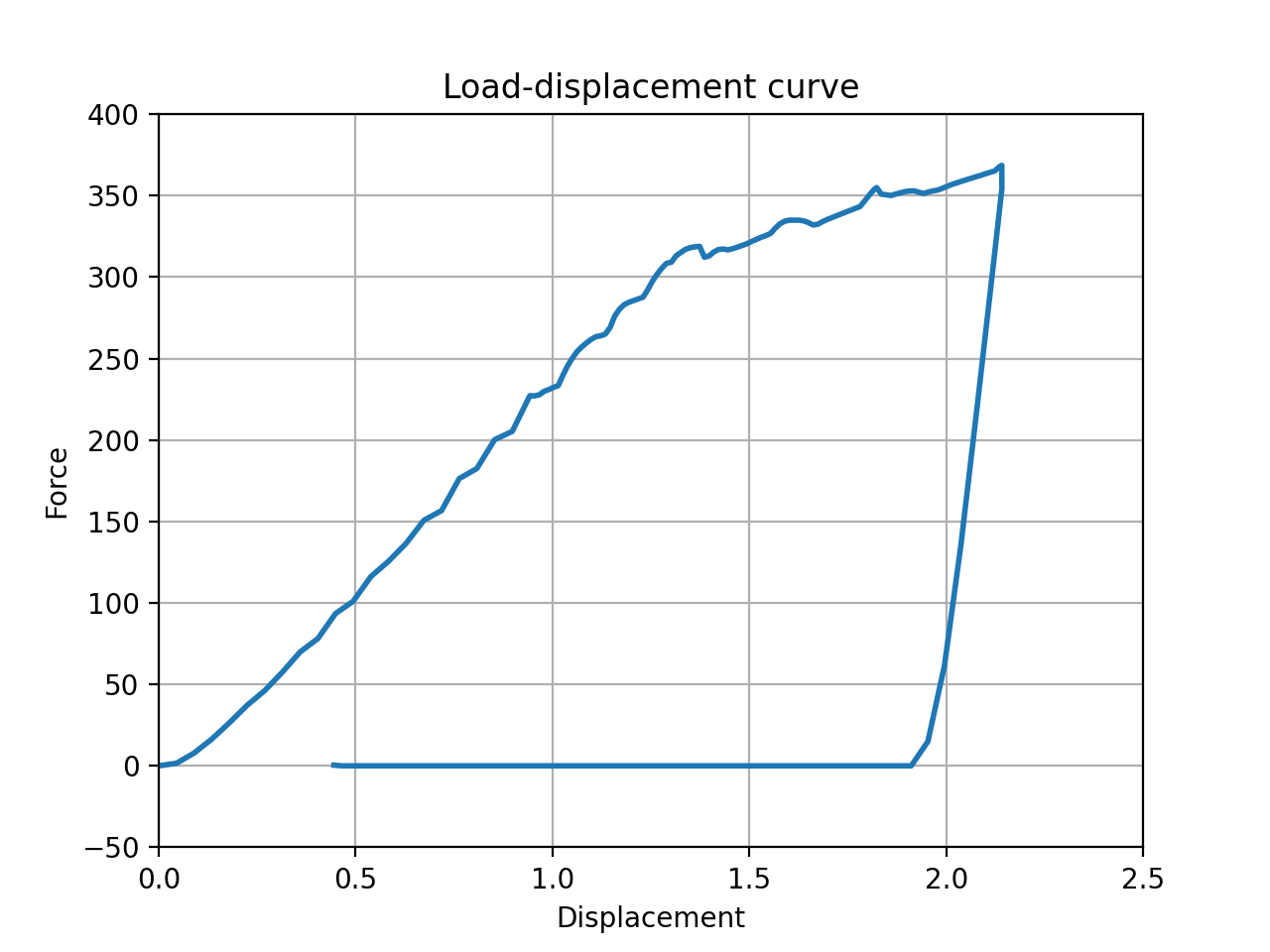
Fig. 2: Load-displacement curve.
Crystal plasticity parameters can be calibrated to match a given experimental nano-indentation test. For this example, the load-displacement curve is shown in Fig. 2.
Notes:
Friction may alter results
Indenter geometry does not reproduce that of a real problem's. Its geometry can be modified in the journal file.
Element distortions may become large