SCM User Notes
The following page is presenting various notes concerning SCM functionality that might be helpful to both new and seasoned users. This page will be updated periodically, so check back often!
SCM index notation
SCM follows the index notation presented in the two figures bellow: where in black numbers is the subchannel index, in white numbers the fuel-pin index and in red numbers the gap index. For both meshes (square, hexagonal) the center of the mesh is the origin.
Square lattice
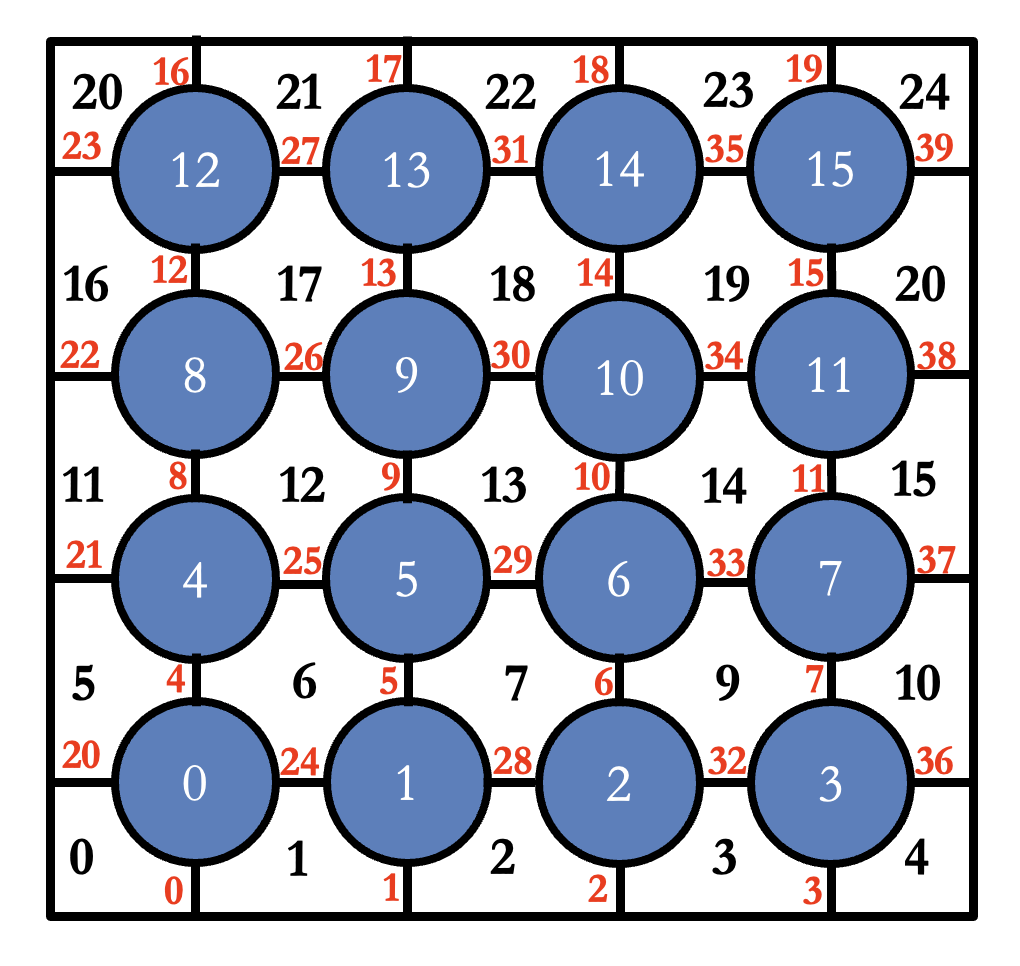
Figure 1: Square Lattice subchannel index notation, in a sub-assembly.
Triangular lattice
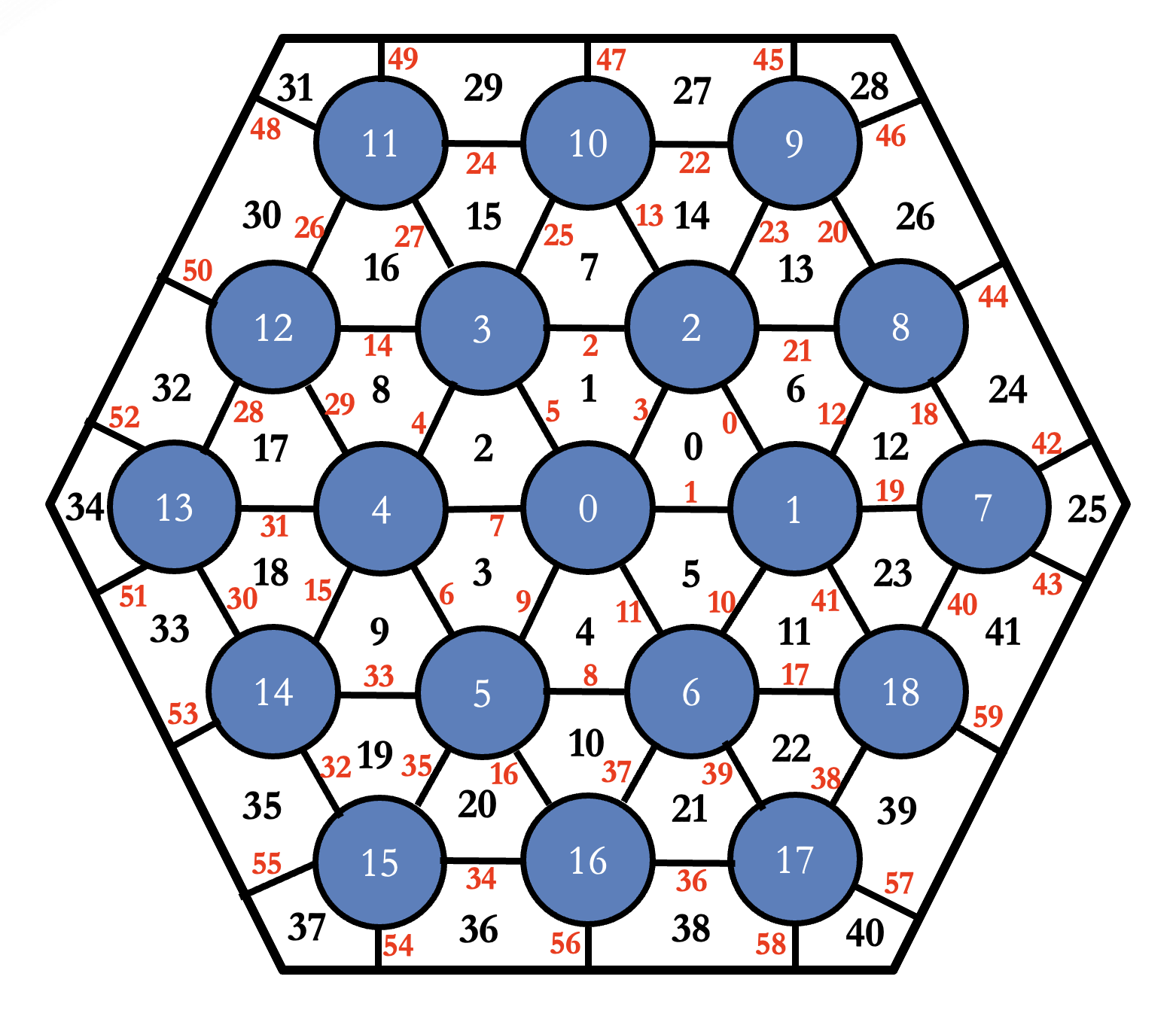
Figure 2: Triangular Lattice subchannel index notation, in a ring sub-assemly.
In order for the user to print the index notation for subchannels and pins in a triangualar lattice arrangement, they are invited to run the following Python script:
import numpy as np
import matplotlib.pyplot as plt
import csv
# Save the _subchannel_to_rod_map as a CSV file with zero-based indices
def save_map_as_csv(map_data, filename):
with open(filename, mode="w", newline="") as file:
writer = csv.writer(file)
writer.writerow(["Subchannel", "Rod1", "Rod2", "Rod3"]) # Header
for key, value in map_data.items():
# Adjust indices to be zero-based
adjusted_value = [v - 1 for v in value]
# Ensure that each row has exactly 4 columns (Subchannel, Rod1, Rod2, Rod3)
row = [key] + adjusted_value + [None] * (3 - len(adjusted_value))
writer.writerow(row)
###################################
# Control parameters
###################################
_n_rings = 5
f = np.sqrt(3) / 2
scale_factor = 0.01
pitch = 0.5664 * scale_factor
center = [0.0, 0.0]
###################################
# Defining input variables
x0 = 0.0
y0 = 0.0
x1 = 0.0
y1 = 0.0
a1 = 0.0
a2 = 0.0
avg_coor_x = 0.0
avg_coor_y = 0.0
dist = 0.0
dist0 = 0.0
kgap = 0
icorner = 0
positive_flow = 1.0
negative_flow = -1.0
_pin_diameter = 0.4419 * scale_factor
_flat_to_flat = 4.64 * scale_factor + 0.005
_duct_to_rod_gap = ((_flat_to_flat / f - (_n_rings - 1) * 2 * pitch) / 2.0) / 4
#################################
# Defining pin positions
#################################
theta = 0.0
dtheta = 0.0
distance = 0.0
theta1 = 0.0
theta_corrected = 0.0
pi = np.pi
k = 0
_rod_position = [[0.0, 0.0]]
for i in range(1, _n_rings):
dtheta, theta = 2.0 * pi / (i * 6), 0.0
for j in range(i * 6):
k = k + 1
theta1 = (theta + 1.0e-10) % (pi / 3.0)
distance = (
(
pow(i * pitch, 2)
+ (theta1 / dtheta * pitch) ** 2
- 2.0 * i * pitch * (theta1 / dtheta * pitch) * np.cos(pi / 3.0)
)
) ** 0.5
# original calculation
value = (
1.0
/ (i * pitch)
/ distance
/ 2.0
* (
(i * pitch) ** 2.0
+ (distance) ** 2.0
- (theta1 / dtheta * pitch) ** 2.0
)
)
# Ensure the value is within the valid range for arccos
if value < -1.0:
value = -1.0
elif value > 1.0:
value = 1.0
theta_corrected = np.arccos(value)
if theta1 < 1.0e-6:
theta_corrected = theta
else:
if theta > pi / 3.0 and theta <= 2.0 / 3.0 * pi:
theta_corrected = theta_corrected + pi / 3.0
elif theta > 2.0 / 3.0 * pi and theta <= pi:
theta_corrected = theta_corrected + 2.0 / 3.0 * pi
elif theta > pi and theta <= 4.0 / 3.0 * pi:
theta_corrected = theta_corrected + pi
elif theta > 4.0 / 3.0 * pi and theta <= 5.0 / 3.0 * pi:
theta_corrected = theta_corrected + 4.0 / 3.0 * pi
elif theta > 5.0 / 3.0 * pi and theta <= 2.0 * pi:
theta_corrected = theta_corrected + 5.0 / 3.0 * pi
pos_x = center[0] + distance * np.cos(theta_corrected)
pos_y = center[0] + distance * np.sin(theta_corrected)
_rod_position.append([pos_x, pos_y])
theta = theta + dtheta
#################################
# Defining pin positions in rings
#################################
_nrods = len(_rod_position)
_rods_in_rings = {}
k = 0
k += 1
_rods_in_rings[0] = [k]
for i in range(1, _n_rings):
loc_list = []
for j in range(0, i * 6):
k += 1
loc_list.append(k)
_rods_in_rings[i] = loc_list
#################################
# Number of channels
#################################
chancount = 0
for j in range(_n_rings - 1):
chancount += j * 6
_n_channels = chancount + _nrods - 1 + (_n_rings - 1) * 6 + 6
#################################
# Suchannels positions
#################################
_subchannel_to_rod_map = {} # Reserve 3
_subch_type = {}
_n_gaps = _n_channels + _nrods - 1
gap_fill = {}
_chan_to_gap_map = {} # Reserve 3
_gap_to_rod_map = {} # Reserve 2
_gap_type = {}
_subchannel_position = {} # Reserve 3
k = 0
kgap = 0
for i in range(1, _n_rings):
# Find closest pin at back ring
for j in range(len(_rods_in_rings[i])):
if j == len(_rods_in_rings[i]) - 1:
_subchannel_to_rod_map[k] = []
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
_subchannel_to_rod_map[k].append(_rods_in_rings[i][0])
avg_coor_x = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][0]
+ _rod_position[_rods_in_rings[i][0] - 1][0]
)
avg_coor_y = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][1]
+ _rod_position[_rods_in_rings[i][0] - 1][1]
)
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i][0])
_gap_type[kgap] = "center"
kgap = kgap + 1
else:
_subchannel_to_rod_map[k] = []
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j + 1])
avg_coor_x = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][0]
+ _rod_position[_rods_in_rings[i][j + 1] - 1][0]
)
avg_coor_y = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][1]
+ _rod_position[_rods_in_rings[i][j + 1] - 1][1]
)
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j + 1])
_gap_type[kgap] = "center"
kgap = kgap + 1
dist0 = 1.0e5
_subchannel_to_rod_map[k].append(_rods_in_rings[i - 1][0])
l0 = 0
for l in range(len(_rods_in_rings[i - 1])):
dist = np.sqrt(
pow(_rod_position[_rods_in_rings[i - 1][l] - 1][0] - avg_coor_x, 2)
+ pow(_rod_position[_rods_in_rings[i - 1][l] - 1][1] - avg_coor_y, 2)
)
if dist < dist0:
_subchannel_to_rod_map[k][2] = _rods_in_rings[i - 1][l]
l0 = l
dist0 = dist
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i - 1][l0])
_gap_type[kgap] = "center"
kgap = kgap + 1
_subch_type[k] = "center"
k = k + 1
# Find the closest pin at front ring
for j in range(len(_rods_in_rings[i])):
if j == len(_rods_in_rings[i]) - 1:
_subchannel_to_rod_map[k] = []
_subchannel_to_rod_map[k].append(_rods_in_rings[i][0])
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
avg_coor_x = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][0]
+ _rod_position[_rods_in_rings[i][0] - 1][0]
)
avg_coor_y = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][1]
+ _rod_position[_rods_in_rings[i][0] - 1][1]
)
else:
_subchannel_to_rod_map[k] = []
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j + 1])
avg_coor_x = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][0]
+ _rod_position[_rods_in_rings[i][j + 1] - 1][0]
)
avg_coor_y = 0.5 * (
_rod_position[_rods_in_rings[i][j] - 1][1]
+ _rod_position[_rods_in_rings[i][j + 1] - 1][1]
)
if i == _n_rings - 1:
_subch_type[k] = "edge"
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_type[kgap] = "edge"
_chan_to_gap_map[k] = []
_chan_to_gap_map[k].append(kgap)
kgap = kgap + 1
k = k + 1
if j % i == 0:
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_type[kgap] = "corner"
_subchannel_to_rod_map[k] = []
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
_subchannel_to_rod_map[k].append(_rods_in_rings[i][j])
_chan_to_gap_map[k] = []
_chan_to_gap_map[k].append(kgap - 1)
_chan_to_gap_map[k].append(kgap)
_subch_type[k] = "corner"
kgap = kgap + 1
k = k + 1
else:
dist0 = 1.0e5
l0 = 0
_subchannel_to_rod_map[k].append(_rods_in_rings[i + 1][0])
for l in range(len(_rods_in_rings[i + 1])):
dist = np.sqrt(
pow(_rod_position[_rods_in_rings[i + 1][l] - 1][0] - avg_coor_x, 2)
+ pow(
_rod_position[_rods_in_rings[i + 1][l] - 1][1] - avg_coor_y, 2
)
)
if dist < dist0:
_subchannel_to_rod_map[k][2] = _rods_in_rings[i + 1][l]
dist0 = dist
l0 = l
_gap_to_rod_map[kgap] = []
_gap_to_rod_map[kgap].append(_rods_in_rings[i][j])
_gap_to_rod_map[kgap].append(_rods_in_rings[i + 1][l0])
_gap_type[kgap] = "center"
kgap = kgap + 1
_subch_type[k] = "center"
k = k + 1
for i in range(_n_channels):
if _subch_type[i] == "center":
for j in range(_n_gaps):
if _gap_type[j] == "center":
if (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][0])
and (_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][1])
) or (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][1])
and (_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][0])
):
try:
_chan_to_gap_map[i].append(j)
except:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(j)
if (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][0])
and (_subchannel_to_rod_map[i][2] == _gap_to_rod_map[j][1])
) or (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][1])
and (_subchannel_to_rod_map[i][2] == _gap_to_rod_map[j][0])
):
try:
_chan_to_gap_map[i].append(j)
except:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(j)
if (
(_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][0])
and (_subchannel_to_rod_map[i][2] == _gap_to_rod_map[j][1])
) or (
(_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][1])
and (_subchannel_to_rod_map[i][2] == _gap_to_rod_map[j][0])
):
try:
_chan_to_gap_map[i].append(j)
except:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(j)
elif _subch_type[i] == "edge":
for j in range(_n_gaps):
if _gap_type[j] == "center":
if (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][0])
and (_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][1])
) or (
(_subchannel_to_rod_map[i][0] == _gap_to_rod_map[j][1])
and (_subchannel_to_rod_map[i][1] == _gap_to_rod_map[j][0])
):
try:
_chan_to_gap_map[i].append(j)
except:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(j)
for k in range(_n_channels):
icorner = 0
if (
_subch_type[k] == "corner"
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[k][0]
):
if len(_chan_to_gap_map[i]) == 0:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(_chan_to_gap_map[k][1])
icorner = 1
break
for k in range(_n_channels):
if (
_subch_type[k] == "corner"
and _subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[k][0]
):
if len(_chan_to_gap_map[i]) == 0:
_chan_to_gap_map[i] = []
_chan_to_gap_map[i].append(_chan_to_gap_map[k][1] + 1)
icorner = 1
break
for i in range(_n_channels):
if _subch_type[i] == "center":
_subchannel_position[i] = [0, 0]
_subchannel_position[i][0] = (
_rod_position[_subchannel_to_rod_map[i][0] - 1][0]
+ _rod_position[_subchannel_to_rod_map[i][1] - 1][0]
+ _rod_position[_subchannel_to_rod_map[i][2] - 1][0]
) / 3.0
_subchannel_position[i][1] = (
_rod_position[_subchannel_to_rod_map[i][0] - 1][1]
+ _rod_position[_subchannel_to_rod_map[i][1] - 1][1]
+ _rod_position[_subchannel_to_rod_map[i][2] - 1][1]
) / 3.0
elif _subch_type[i] == "edge":
for j in range(_n_channels):
if _subch_type[j] == "center" and (
(
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][0]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][1]
)
or (
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][1]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][0]
)
):
x0 = _rod_position[_subchannel_to_rod_map[j][2] - 1][0]
y0 = _rod_position[_subchannel_to_rod_map[j][2] - 1][1]
elif _subch_type[j] == "center" and (
(
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][0]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][2]
)
or (
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][2]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][0]
)
):
x0 = _rod_position[_subchannel_to_rod_map[j][1] - 1][0]
y0 = _rod_position[_subchannel_to_rod_map[j][1] - 1][1]
elif _subch_type[j] == "center" and (
(
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][1]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][2]
)
or (
_subchannel_to_rod_map[i][0] == _subchannel_to_rod_map[j][2]
and _subchannel_to_rod_map[i][1] == _subchannel_to_rod_map[j][1]
)
):
x0 = _rod_position[_subchannel_to_rod_map[j][1] - 1][0]
y0 = _rod_position[_subchannel_to_rod_map[j][1] - 1][1]
# else:
# x0 = _rod_position[_subchannel_to_rod_map[j][0]-1][0];
# y0 = _rod_position[_subchannel_to_rod_map[j][0]-1][1];
x1 = 0.5 * (
_rod_position[_subchannel_to_rod_map[i][0] - 1][0]
+ _rod_position[_subchannel_to_rod_map[i][1] - 1][0]
)
y1 = 0.5 * (
_rod_position[_subchannel_to_rod_map[i][0] - 1][1]
+ _rod_position[_subchannel_to_rod_map[i][1] - 1][1]
)
a1 = _pin_diameter / 2.0 + _duct_to_rod_gap / 2.0
a2 = np.sqrt((x1 - x0) * (x1 - x0) + (y1 - y0) * (y1 - y0)) + a1
_subchannel_position[i] = [0, 0]
_subchannel_position[i][0] = (a2 * x1 - a1 * x0) / (a2 - a1)
_subchannel_position[i][1] = (a2 * y1 - a1 * y0) / (a2 - a1)
elif _subch_type[i] == "corner":
x0 = _rod_position[0][0]
y0 = _rod_position[0][1]
x1 = _rod_position[_subchannel_to_rod_map[i][0] - 1][0]
y1 = _rod_position[_subchannel_to_rod_map[i][0] - 1][1]
a1 = _pin_diameter / 2.0 + _duct_to_rod_gap / 2.0
a2 = np.sqrt((x1 - x0) * (x1 - x0) + (y1 - y0) * (y1 - y0)) + a1
_subchannel_position[i] = [0, 0]
_subchannel_position[i][0] = (a2 * x1 - a1 * x0) / (a2 - a1)
_subchannel_position[i][1] = (a2 * y1 - a1 * y0) / (a2 - a1)
plt.figure(figsize=[6, 6])
_rod_position = np.array(_rod_position)
plt.plot(_rod_position[:, 0], _rod_position[:, 1], "o", markersize=22)
number = 0
for x, y in zip(_rod_position[:, 0], _rod_position[:, 1]):
plt.text(x, y, str(number), color="white", fontsize=8)
number += 1
for key in _subchannel_position:
plt.plot(_subchannel_position[key][0], _subchannel_position[key][1], "ro")
plt.ylabel("Y [m]")
plt.xlabel("X [m]")
plt.xlim(
[
-(_n_rings - 1) * pitch - 2 * _pin_diameter,
(_n_rings - 1) * pitch + 2 * _pin_diameter,
]
)
plt.ylim(
[
-(_n_rings - 1) * pitch - 2 * _pin_diameter,
(_n_rings - 1) * pitch + 2 * _pin_diameter,
]
)
plt.savefig("subchannel_position.png", bbox_inches="tight", pad_inches=0.1)
plt.figure(figsize=[9, 9])
_rod_position = np.array(_rod_position)
plt.plot(_rod_position[:, 0], _rod_position[:, 1], "o", markersize=29)
number = 0
for x, y in zip(_rod_position[:, 0], _rod_position[:, 1]):
plt.text(x, y, str(number), color="white", fontsize=10)
number += 1
for key in _subchannel_position:
plt.plot(_subchannel_position[key][0], _subchannel_position[key][1], "ro")
number = 0
for key in _subchannel_position:
plt.text(
_subchannel_position[key][0],
_subchannel_position[key][1],
str(number),
color="black",
fontsize=10,
)
number += 1
plt.ylabel("Y [m]")
plt.xlabel("X [m]")
plt.xlim(
[
-0.85 * (_n_rings - 1) * pitch - 2 * _pin_diameter,
0.85 * (_n_rings - 1) * pitch + 2 * _pin_diameter,
]
)
plt.ylim(
[
-0.7 * (_n_rings - 1) * pitch - 2 * _pin_diameter,
0.7 * (_n_rings - 1) * pitch + 2 * _pin_diameter,
]
)
plt.savefig("rod_position.png", bbox_inches="tight", pad_inches=0.1)
save_map_as_csv(_subchannel_to_rod_map, "subchannel_to_rod_map.csv")
Pressure boundary condition caveat
SCM's solver is designed to solve for relative pressure: , such that the relative pressure at the outlet boundary is always zero. The pressure boundary condition is only explicitly used in the calculation of fluid properties. The user should be careful to initialize/set the pressure at the assembly outlet to zero (not setting it at all will also define the default value of zero).
The displacement variable
The 'displacement' variable is used as a way to model a deformed duct. It's a per subchannel variable that affects the calculation of the geometric parameters (wetted perimeter, flow area) Kyriakopoulos and Retamales (2024) of the subchannels next to the duct.
Naming/Branding
Initially SCM was part of Pronghorn. It was called Pronghorn-Subchannel, Pr-Sub. Once the code became a MOOSE module it has been re-branded as SCM.
References
- Vasileios Kyriakopoulos and Mauricio Tano Retamales.
Validation of moose’s subchannel module using the areva fctf heated bundle benchmark.
Nuclear Engineering and Design, 428:113562, 2024.[Export]