- beta0.25beta value
Default:0.25
C++ Type:double
Unit:(no unit assumed)
Controllable:No
Description:beta value
- gamma0.5gamma value
Default:0.5
C++ Type:double
Unit:(no unit assumed)
Controllable:No
Description:gamma value
- inactive_tsteps0The time derivatives will set to be zero for this number of time steps.
Default:0
C++ Type:int
Controllable:No
Description:The time derivatives will set to be zero for this number of time steps.
- variablesA subset of the variables that this time integrator should be applied to
C++ Type:std::vector<VariableName>
Unit:(no unit assumed)
Controllable:No
Description:A subset of the variables that this time integrator should be applied to
NewmarkBeta
Computes the first and second time derivative of variable using Newmark-Beta method.
Description
Newmark time integration (Newmark, 1959) is one of the commonly used time integration methods in structural dynamics problems. In this method, the second () and first () time derivatives of a variable at are written in terms of the , and at time , and at as shown below:
In the above equations, and are Newmark time integration parameters.
For and , the Newmark time integration method is implicit, unconditionally stable and second order accurate in time. This is the constant average acceleration method with no numerical damping.
and results in the linear acceleration method where the acceleration is linearly varying between and . This method is also implicit, unconditionally stable and second order accurate in time. However, there is a small numerical damping when the linear acceleration method is used.
For , the method is second order accurate and it is unconditionally stable for .
When using the constant average acceleration method that has no numerical damping, high frequency noise can sometimes be observed in the velocity and acceleration time histories for a problem with prescribed displacement (Bathe and Noh, 2012). Using other parameters for and results in non-zero numerical damping that damps out part of the high frequency noise but not all of it. Hilber-Hughes-Taylor (HHT) time integration is a variation of the Newmark method that damps out high frequency noise especially in structural dynamics problems. More details about this Newmark and HHT time integration schemes can be found in these lecture notes. HHT time integration requires modification to the equation of motion and is currently implemented only for structural dynamics problems in solid mechanics module.
When using Newmark time integration in structural dynamics problems that require an initial static step (most commonly for gravity analysis), a convenient method in MOOSE is to disable the inertia kernels (which can be done using the controls system), the velocity and acceleration calculations, and the stiffness damping (which can be done by setting static_initialization=true in the stressdivergence kernels) during the first time step. This leads to solving the equation, Ku = F, in the first time step, which essentially initializes displacements and stresses from gravity loading. When using the Newmark-Beta time integrator (which we most often use for dynamics) or any other time integrator, we cannot switch off time derivatives (velocity and acceleration) calculations through the control system. Therefore, the time integrator will compute velocity and acceleration for the static step. When using the Newmark-Beta time integration for this purpose, this will result in noisy acceleration and velocity responses in the whole simulation. Such spurious responses can be avoided by using the inactive_tsteps parameter. This parameter ensures that the NewmarkBeta time integrator returns zero derivatives for the first few time steps and starting the acceleration and velocity calculations after that. The time derivative calculations are started when the time step number is greater than inactive_tsteps.
A sample result of using this parameter is shown in Figure 1, Figure 2, and Figure 3 below. The result corresponds to the time derivative of a ramp function, which is typically the displacement response under gravity. The velocities and accelerations calculated for this function without using the inactive_tsteps parameter (blue) and using inactive_tsteps=1 (orange) are shown. The input syntax used to generate the orange plots below is listed after the figures below.
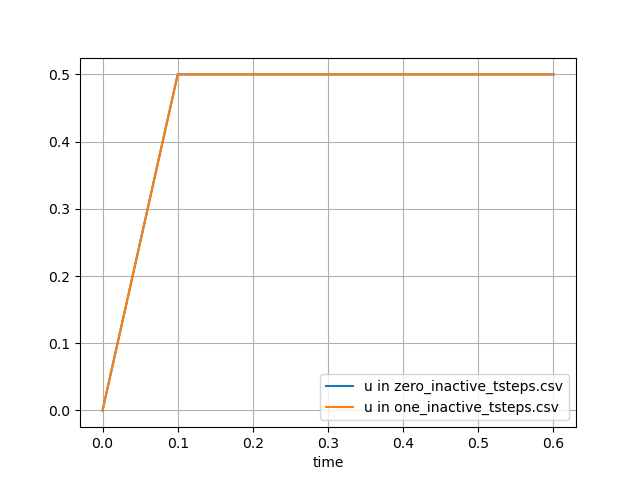
Figure 1: Displacement
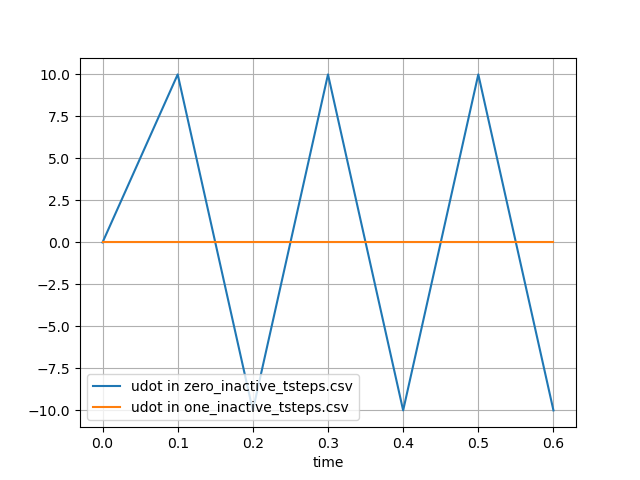
Figure 2: Velocity
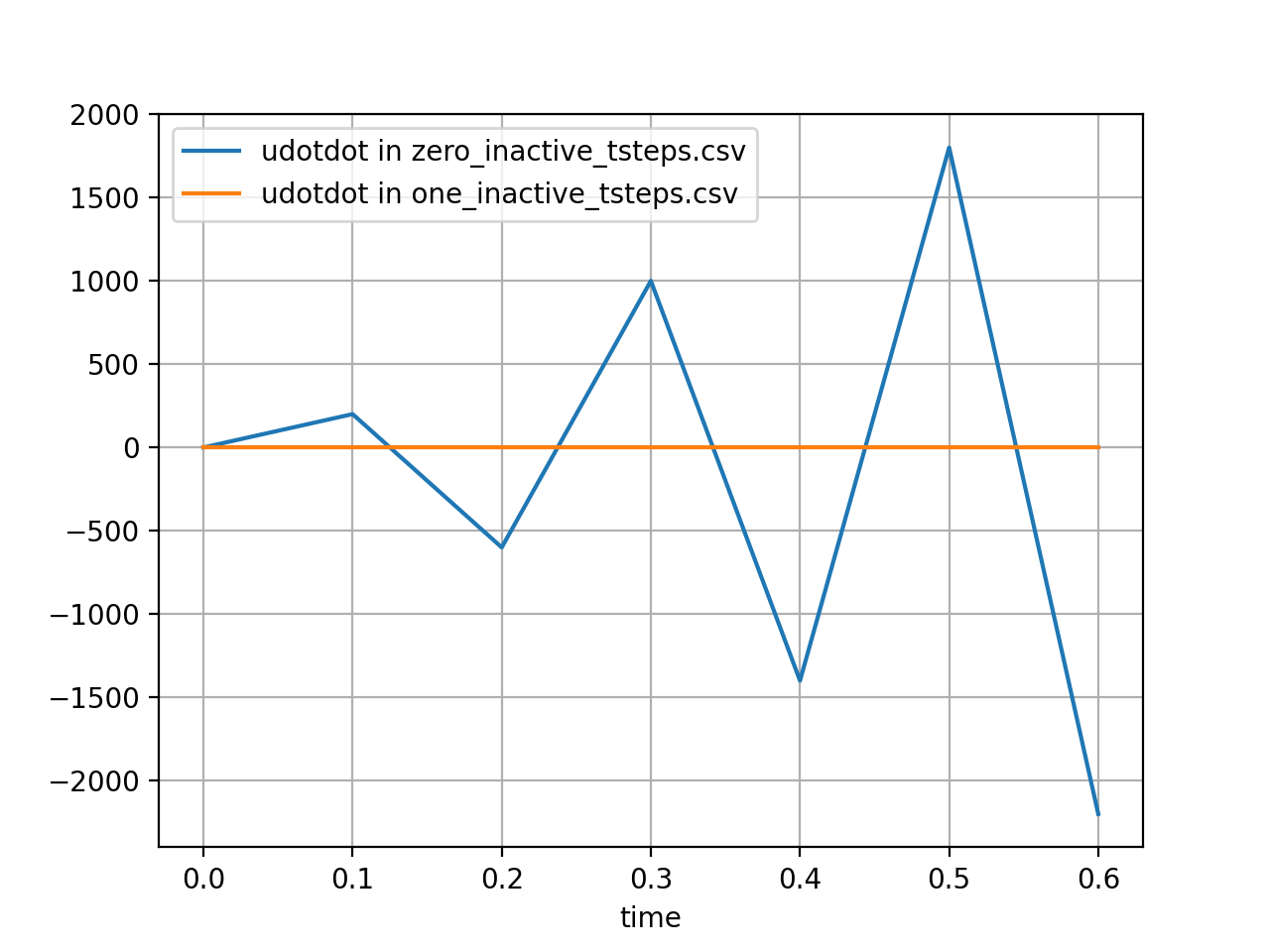
Figure 3: Acceleration
[Executioner<<<{"href": "../../syntax/Executioner/index.html"}>>>]
type = Transient
start_time = 0.0
num_steps = 6
dt = 0.1
[TimeIntegrator<<<{"href": "../../syntax/Executioner/TimeIntegrator/index.html"}>>>]
type = NewmarkBeta
inactive_tsteps = 1
[]
[]Input Parameters
- control_tagsAdds user-defined labels for accessing object parameters via control logic.
C++ Type:std::vector<std::string>
Controllable:No
Description:Adds user-defined labels for accessing object parameters via control logic.
- enableTrueSet the enabled status of the MooseObject.
Default:True
C++ Type:bool
Controllable:No
Description:Set the enabled status of the MooseObject.
Advanced Parameters
Input Files
- (modules/contact/test/tests/mortar_dynamics/block-dynamics-action.i)
- (test/tests/time_integrators/newmark-beta/newmark_beta_prescribed_parameters.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test-action.i)
- (modules/contact/test/tests/mortar_dynamics/block-dynamics-friction-creep.i)
- (modules/fsi/test/tests/fsi_acoustics/1D_fluid_only/1D_fluid_only.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-wear-vel.i)
- (modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics.i)
- (modules/electromagnetics/test/tests/benchmarks/dipole_antenna/dipole_transient.i)
- (modules/solid_mechanics/test/tests/central_difference/consistent/1D/1d_consistent_implicit.i)
- (modules/solid_mechanics/test/tests/gravity/block-gravity-kinetic-energy.i)
- (modules/solid_mechanics/test/tests/dynamics/wave_1D/wave_rayleigh_hht_ti.i)
- (modules/solid_mechanics/test/tests/central_difference/consistent/2D/2d_consistent_implicit.i)
- (modules/solid_mechanics/test/tests/central_difference/consistent/3D/3d_consistent_implicit.i)
- (modules/fsi/test/tests/fsi_acoustics/wave_height_bc/wave_height_bc.i)
- (modules/contact/test/tests/mortar_dynamics/block-dynamics-friction-action.i)
- (modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics-light.i)
- (modules/solid_mechanics/test/tests/central_difference/lumped/3D/3d_nodalmass_implicit.i)
- (modules/fsi/test/tests/fsi_acoustics/3D_struc_acoustic/3D_struc_acoustic.i)
- (modules/solid_mechanics/test/tests/beam/dynamic/dyn_euler_small_rayleigh_hht_ti.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-wear.i)
- (modules/contact/test/tests/mortar_dynamics/block-dynamics-reference.i)
- (modules/contact/test/tests/mortar_dynamics/block-dynamics-friction.i)
- (modules/solid_mechanics/test/tests/central_difference/lumped/2D/2d_nodalmass_implicit.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test-projection_angle.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-vel.i)
- (test/tests/variables/time_derivatives_neighbor/test.i)
- (modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free.i)
- (modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test.i)
- (modules/solid_mechanics/test/tests/central_difference/lumped/1D/1d_nodalmass_implicit.i)
- (test/tests/time_integrators/newmark-beta/newmark_beta_inactive_steps.i)
- (modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free_orientation_inclined.i)
- (modules/fsi/test/tests/fsi_acoustics/1D_struc_acoustic/1D_struc_acoustic.i)
- (modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free_orientation_inclined_hht.i)
- (modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics-light-function.i)
- (test/tests/kernels/vector_dot_dot/vector_test.i)
- (modules/contact/test/tests/mortar_dynamics/block-dynamics.i)
- (modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment.i)
References
- K. J. Bathe and G. Noh.
Insight into an implicit time integration scheme for structural dynamics.
Computers and Structures, 98-99:1–6, 2012.[BibTeX]
@article{bathe2012insight, author = "Bathe, K. J. and Noh, G.", title = "Insight into an implicit time integration scheme for structural dynamics", journal = "Computers and Structures", volume = "98-99", pages = "1-6", year = "2012" } - N. M. Newmark.
A method of computation for structural dynamics.
Journal of Engineering Mechanics, 85(EM3):67–94, 1959.[BibTeX]
@article{newmark1959amethod, author = "Newmark, N. M.", title = "A method of computation for structural dynamics", journal = "Journal of Engineering Mechanics", publisher = "ASCE", volume = "85", number = "EM3", pages = "67--94", year = "1959" }
(test/tests/time_integrators/newmark-beta/newmark_beta_inactive_steps.i)
###########################################################
# This is a simple test with a time-dependent problem
# demonstrating the use of the TimeIntegrator system.
#
# Testing that the active_time parameter works as intended.
#
###########################################################
[Mesh]
type = GeneratedMesh
dim = 2
xmin = -1
xmax = 1
ymin = -1
ymax = 1
nx = 1
ny = 1
[]
[Variables]
[u]
[]
[]
[Functions]
[forcing_fn]
type = PiecewiseLinear
x = '0.0 0.1 0.6'
y = '0.0 1.0 1.0'
[]
[]
[Kernels]
[ie]
type = TimeDerivative
variable = u
[]
[diff]
type = Diffusion
variable = u
[]
[]
[BCs]
[left]
type = DirichletBC
variable = u
boundary = 'left'
value = 0
[]
[right]
type = FunctionDirichletBC
variable = u
boundary = 'right'
function = forcing_fn
[]
[]
[Executioner]
type = Transient
start_time = 0.0
num_steps = 6
dt = 0.1
[TimeIntegrator]
type = NewmarkBeta
inactive_tsteps = 1
[]
[]
[Postprocessors]
[udot]
type = ElementAverageTimeDerivative
variable = u
[]
[udotdot]
type = ElementAverageSecondTimeDerivative
variable = u
[]
[u]
type = ElementAverageValue
variable = u
[]
[]
[Outputs]
csv = true
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics-action.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
[file]
type = FileMeshGenerator
file = long-bottom-block-no-lower-d.e
[]
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[]
[Contact]
[mechanical]
primary = 20
secondary = 10
formulation = mortar
model = frictionless
c_normal = 1e4
capture_tolerance = 1.0e-5
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * t'
[]
[]
[Executioner]
type = Transient
end_time = 75
dt = 0.05
dtmin = .05
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu NONZERO 1e-15 1e-5'
nl_max_its = 20
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = ''
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[]
(test/tests/time_integrators/newmark-beta/newmark_beta_prescribed_parameters.i)
###########################################################
# This is a simple test with a time-dependent problem
# demonstrating the use of the TimeIntegrator system.
#
# Testing that the first and second time derivatives
# are calculated correctly using the Newmark-Beta method
#
# @Requirement F1.30
###########################################################
[Mesh]
type = GeneratedMesh
dim = 2
xmin = -1
xmax = 1
ymin = -1
ymax = 1
nx = 1
ny = 1
[]
[Variables]
[u]
[]
[]
[Functions]
[forcing_fn]
type = PiecewiseLinear
x = '0.0 0.1 0.2 0.3 0.4 0.5 0.6'
y = '0.0 0.0 0.0025 0.01 0.0175 0.02 0.02'
[]
[]
[Kernels]
[ie]
type = TimeDerivative
variable = u
[]
[diff]
type = Diffusion
variable = u
[]
[]
[BCs]
[left]
type = FunctionDirichletBC
variable = u
boundary = 'left'
function = forcing_fn
[]
[right]
type = FunctionDirichletBC
variable = u
boundary = 'right'
function = forcing_fn
[]
[]
[Executioner]
type = Transient
start_time = 0.0
num_steps = 6
dt = 0.1
[TimeIntegrator]
type = NewmarkBeta
beta = 0.4225
gamma = 0.8
[]
[]
[Postprocessors]
[udot]
type = ElementAverageTimeDerivative
variable = u
[]
[udotdot]
type = ElementAverageSecondTimeDerivative
variable = u
[]
[u]
type = ElementAverageValue
variable = u
[]
[]
[Outputs]
csv = true
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test-action.i)
starting_point = 0.5e-1
offset = -0.045
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
[file]
type = FileMeshGenerator
file = long-bottom-block-1elem-blocks.e
[]
[remote]
type = BlockDeletionGenerator
input = file
block = '3 4'
[]
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[]
[Problem]
material_coverage_check = false
kernel_coverage_check = false
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 1.0
accelerations = 'accel_x accel_y'
generate_output = 'stress_xx stress_yy'
block = '1 2'
strain = FINITE
density = density
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[worn_depth]
block = 'normal_secondary_subdomain'
[]
[gap_vel]
block = 'normal_secondary_subdomain'
[]
[vel_x]
order = FIRST
family = LAGRANGE
[]
[vel_y]
order = FIRST
family = LAGRANGE
[]
[accel_x]
order = FIRST
family = LAGRANGE
[]
[accel_y]
order = FIRST
family = LAGRANGE
[]
[]
[AuxKernels]
[gap_vel]
type = WeightedGapVelAux
variable = gap_vel
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = normal_primary_subdomain
secondary_subdomain = normal_secondary_subdomain
disp_x = disp_x
disp_y = disp_y
[]
[worn_depth]
type = MortarArchardsLawAux
variable = worn_depth
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = normal_primary_subdomain
secondary_subdomain = normal_secondary_subdomain
displacements = 'disp_x disp_y'
friction_coefficient = 0.5
energy_wear_coefficient = 1.0e-6
normal_pressure = normal_normal_lm
execute_on = 'TIMESTEP_END'
[]
[]
[Contact]
[normal]
formulation = mortar
model = coulomb
primary = 20
secondary = 10
c_normal = 1e+06
c_tangential = 1.0e+6
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
mortar_dynamics = true
wear_depth = worn_depth
friction_coefficient = 0.5
normalize_c = true
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(4.0 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * (cos(32.0 * pi / 4 * t) - 1.0)'
[]
[]
[Executioner]
type = Transient
end_time = 0.5
dt = 0.05
dtmin = .002
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type '
'-pc_factor_shift_amount'
petsc_options_value = 'lu superlu_dist NONZERO 1e-15'
nl_max_its = 40
l_max_its = 15
line_search = 'l2'
snesmf_reuse_base = true
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics-friction-creep.i)
starting_point = 1e-1
offset = -0.095
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[normal_lm]
block = 3
use_dual = true
[]
[frictional_lm]
block = 3
use_dual = true
[]
[]
[AuxVariables]
[creep_strain_xx]
order = CONSTANT
family = MONOMIAL
block = '2'
[]
[creep_strain_yy]
order = CONSTANT
family = MONOMIAL
block = '2'
[]
[creep_strain_xy]
order = CONSTANT
family = MONOMIAL
block = '2'
[]
[]
[AuxKernels]
[creep_strain_xx]
type = RankTwoAux
rank_two_tensor = creep_strain
variable = creep_strain_xx
index_i = 0
index_j = 0
block = '2'
[]
[creep_strain_yy]
type = RankTwoAux
rank_two_tensor = creep_strain
variable = creep_strain_yy
index_i = 1
index_j = 1
block = '2'
[]
[creep_strain_xy]
type = RankTwoAux
rank_two_tensor = creep_strain
variable = creep_strain_xy
index_i = 0
index_j = 1
block = '2'
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
add_variables = true
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 0.01
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
block = '1 2'
strain = FINITE
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[multiple_inelastic]
type = ComputeMultipleInelasticStress
inelastic_models = 'creep'
block = '2'
[]
[creep]
type = PowerLawCreepStressUpdate
coefficient = 1.0e-23 # 10e-24
n_exponent = 4
activation_energy = 0
block = '2'
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '775'
[]
[]
# User object provides the contact force (e.g. LM)
# for the application of the generalized force
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable_normal = normal_lm
lm_variable_tangential_one = frictional_lm
secondary_variable = disp_x
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
friction_lm = frictional_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
c_t = 1e4
mu = 0.5
interpolate_normals = false
newmark_beta = 0.25
newmark_gamma = 0.5
capture_tolerance = 1e-04
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 30 # 50
function = '1e-2*t' #'0.1 *sin(2 * pi / 12 * t)'
[]
[]
[Executioner]
type = Transient
end_time = 0.25
dt = 0.05
dtmin = 0.05
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu NONZERO 1e-15 1e-5'
nl_max_its = 50
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/fsi/test/tests/fsi_acoustics/1D_fluid_only/1D_fluid_only.i)
# Test for `AcousticInertia` and `Diffusion` kernels with only the fluid domain. The
# domain is 1D with length 1m and is subjected to an initial condition composed of
# a combination of sine waves. Fluid pressure is recorded at the midpoint of the
# domain. The recorded fluid pressure should match with analytical results. Because
# this implementation is equivalent to solving a 1D wave equation, analytical results
# exist.
#
# Input parameters:
# Dimensions = 1
# Length = 1 meter
# Fluid speed of sound = 1 m/s
# Initial condition = sin(pi*x) + sin(3*pi*x) + sin(5*3.141*x) + sin(7*pi*x) + sin(9*pi*x)
# Fluid domain = true
# Fluid BCs = pressures are zero on both the boundaries
# Structural domain = false
[Mesh]
[gen]
type = GeneratedMeshGenerator
dim = 1
nx = 500
xmax = 1
[]
[]
[GlobalParams]
[]
[Variables]
[./p]
[../]
[]
[Kernels]
[./diffusion]
type = Diffusion
variable = 'p'
[../]
[./inertia]
type = AcousticInertia
variable = p
[../]
[]
[BCs]
[./leftright_pressure]
type = DirichletBC
variable = p
boundary = 'left right'
value = 0
[../]
[]
[ICs]
[./u_ic]
type = FunctionIC
variable = 'p'
function = initial_cond
[../]
[]
[Functions]
[./initial_cond]
type = ParsedFunction
expression = 'sin(pi*x) + sin(3*pi*x) + sin(5*3.141*x) + sin(7*pi*x) + sin(9*pi*x)'
[../]
[]
[Materials]
[./co_sq]
type = GenericConstantMaterial
prop_names = inv_co_sq
prop_values = 1
[../]
[]
[Executioner]
type = Transient
solve_type = 'NEWTON'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_package'
petsc_options_value = 'lu superlu_dist'
start_time = 0.0
end_time = 1.0
dt = 0.005
dtmin = 0.00001
nl_abs_tol = 1e-12
nl_rel_tol = 1e-12
l_tol = 1e-12
l_max_its = 25
timestep_tolerance = 1e-8
automatic_scaling = true
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Postprocessors]
[./p1]
type = PointValue
point = '0.5 0.0 0.0'
variable = p
[../]
[]
[Outputs]
csv = true
perf_graph = true
print_linear_residuals = true
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-wear-vel.i)
starting_point = 0.5e-1
offset = -0.05
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
scaling = 1.0e3
[]
[frictional_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[worn_depth]
block = '3'
[]
[gap_vel]
block = '3'
[]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[gap_vel]
type = WeightedGapVelAux
variable = gap_vel
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
disp_x = disp_x
disp_y = disp_y
[]
[worn_depth]
type = MortarArchardsLawAux
variable = worn_depth
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
displacements = 'disp_x disp_y'
friction_coefficient = 0.5
energy_wear_coefficient = 1.0
normal_pressure = normal_lm
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
secondary_variable = disp_x
lm_variable_normal = normal_lm
lm_variable_tangential_one = frictional_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
c_t = 1e6
mu = 0.15
friction_lm = frictional_lm
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(16.0 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * t'
[]
[]
[Executioner]
type = Transient
end_time = 0.3
dt = 0.03
dtmin = .002
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu superlu_dist NONZERO 1e-15'
nl_max_its = 40
nl_abs_tol = 1.0e-11
nl_rel_tol = 1.0e-11
line_search = 'none'
snesmf_reuse_base = true
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics.i)
starting_point = 0.25
offset = 0.00
[GlobalParams]
displacements = 'disp_x disp_y disp_z'
volumetric_locking_correction = true
[]
[AuxVariables]
[mortar_tangent_x]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_y]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_z]
family = LAGRANGE
order = FIRST
[]
[]
[AuxKernels]
[friction_x_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_x
component = 0
boundary = 'top_bottom'
[]
[friction_y_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_y
component = 1
boundary = 'top_bottom'
[]
[friction_z_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_z
component = 2
boundary = 'top_bottom'
[]
[]
[Mesh]
[top_block]
type = GeneratedMeshGenerator
dim = 3
nx = 3
ny = 3
nz = 3
xmin = -0.25
xmax = 0.25
ymin = -0.25
ymax = 0.25
zmin = -0.25
zmax = 0.25
elem_type = HEX8
[]
[rotate_top_block]
type = TransformGenerator
input = top_block
transform = ROTATE
vector_value = '0 0 0'
[]
[top_block_sidesets]
type = RenameBoundaryGenerator
input = rotate_top_block
old_boundary = '0 1 2 3 4 5'
new_boundary = 'top_bottom top_back top_right top_front top_left top_top'
[]
[top_block_id]
type = SubdomainIDGenerator
input = top_block_sidesets
subdomain_id = 1
[]
[bottom_block]
type = GeneratedMeshGenerator
dim = 3
nx = 10
ny = 10
nz = 2
xmin = -.5
xmax = .5
ymin = -.5
ymax = .5
zmin = -.3
zmax = -.25
elem_type = HEX8
[]
[bottom_block_id]
type = SubdomainIDGenerator
input = bottom_block
subdomain_id = 2
[]
[bottom_block_change_boundary_id]
type = RenameBoundaryGenerator
input = bottom_block_id
old_boundary = '0 1 2 3 4 5'
new_boundary = '100 101 102 103 104 105'
[]
[combined]
type = MeshCollectionGenerator
inputs = 'top_block_id bottom_block_change_boundary_id'
[]
[block_rename]
type = RenameBlockGenerator
input = combined
old_block = '1 2'
new_block = 'top_block bottom_block'
[]
[bottom_right_sideset]
type = SideSetsAroundSubdomainGenerator
input = block_rename
new_boundary = bottom_right
block = bottom_block
normal = '1 0 0'
[]
[bottom_left_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_right_sideset
new_boundary = bottom_left
block = bottom_block
normal = '-1 0 0'
[]
[bottom_top_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_left_sideset
new_boundary = bottom_top
block = bottom_block
normal = '0 0 1'
[]
[bottom_bottom_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_top_sideset
new_boundary = bottom_bottom
block = bottom_block
normal = '0 0 -1'
[]
[bottom_front_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_bottom_sideset
new_boundary = bottom_front
block = bottom_block
normal = '0 1 0'
[]
[bottom_back_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_front_sideset
new_boundary = bottom_back
block = bottom_block
normal = '0 -1 0'
[]
[secondary]
input = bottom_back_sideset
type = LowerDBlockFromSidesetGenerator
sidesets = 'top_bottom' # top_back top_left'
new_block_id = '10001'
new_block_name = 'secondary_lower'
[]
[primary]
input = secondary
type = LowerDBlockFromSidesetGenerator
sidesets = 'bottom_top'
new_block_id = '10000'
new_block_name = 'primary_lower'
[]
uniform_refine = 0
allow_renumbering = false
[]
[Variables]
[mortar_normal_lm]
block = 'secondary_lower'
use_dual = true
[]
[mortar_tangential_lm]
block = 'secondary_lower'
use_dual = true
[]
[mortar_tangential_3d_lm]
block = 'secondary_lower'
use_dual = true
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
add_variables = true
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 0.1
displacements = 'disp_x disp_y disp_z'
generate_output = 'stress_xx stress_xy stress_xz stress_yy stress_zz'
block = '1 2'
strain = FINITE
density = density
[]
[]
[Materials]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '1.0'
[]
[tensor]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1.0e4
poissons_ratio = 0.0
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[tensor_1000]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e5
poissons_ratio = 0.0
[]
[stress_1000]
type = ComputeFiniteStrainElasticStress
block = '2'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable_normal = mortar_normal_lm
lm_variable_tangential_one = mortar_tangential_lm
lm_variable_tangential_two = mortar_tangential_3d_lm
secondary_variable = disp_x
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[friction]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
disp_x = disp_x
disp_y = disp_y
disp_z = disp_z
use_displaced_mesh = true
friction_lm = mortar_tangential_lm
friction_lm_dir = mortar_tangential_3d_lm
mu = 0.4
c = 1e4
c_t = 1.0e4
newmark_gamma = 0.5
newmark_beta = 0.25
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_z]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_x
component = x
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_y
component = y
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_z
component = z
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[botz]
type = DirichletBC
variable = disp_z
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[topx]
type = DirichletBC
variable = disp_x
boundary = 'top_top'
value = 0.0
[]
[topy]
type = DirichletBC
variable = disp_y
boundary = 'top_top'
value = 0.0
[]
[topz]
type = FunctionDirichletBC
variable = disp_z
boundary = 'top_top'
function = '-${starting_point} * sin(2 * pi / 40 * t) + ${offset}'
[]
[]
[Executioner]
type = Transient
end_time = .025
dt = .025
dtmin = .001
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu NONZERO 1e-14'
nl_rel_tol = 1e-11
nl_abs_tol = 1e-11
line_search = 'basic'
[TimeIntegrator]
type = NewmarkBeta
gamma = 0.5
beta = 0.25
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
csv = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'contact'
[contact]
type = ContactDOFSetSize
variable = mortar_normal_lm
subdomain = 'secondary_lower'
execute_on = 'nonlinear timestep_end'
[]
[]
[VectorPostprocessors]
[contact-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_normal_lm
sort_by = 'id'
execute_on = NONLINEAR
[]
[frictional-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[frictional-pressure-3d]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_3d_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_x]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_x
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_y]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_y
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[]
(modules/electromagnetics/test/tests/benchmarks/dipole_antenna/dipole_transient.i)
# Verification Benchmark - Half-wave Dipole Antenna (Frequency Domain)
# Resonant Frequency = 1 GHz
# Wave Propagation Medium: Vacuum
[Mesh]
[fmg]
type = FileMeshGenerator
file = dipole_antenna_1G.msh
[]
[]
[Variables]
[E_real]
order = FIRST
family = NEDELEC_ONE
[]
[E_imag]
order = FIRST
family = NEDELEC_ONE
[]
[]
[Kernels]
[curl_curl_real]
type = CurlCurlField
variable = E_real
[]
[time_derivative_real]
type = VectorSecondTimeDerivative
variable = E_real
coefficient = '1/(3e8 * 3e8)' # 1/c^2 = mu_0 * eps_0
[]
[curl_curl_imag]
type = CurlCurlField
variable = E_imag
[]
[time_derivative_imag]
type = VectorSecondTimeDerivative
variable = E_imag
coefficient = '1/(3e8 * 3e8)' # 1/c^2 = mu_0 * eps_0
[]
[]
[BCs]
[antenna_real] # Impose exact solution of electric field onto antenna surface.
type = VectorCurlPenaltyDirichletBC # Replace with proper antenna surface current condition.
penalty = 1e5
function_y = 'cos(2*pi*1e9*t)'
boundary = antenna
variable = E_real
[]
[antenna_imag]
type = VectorCurlPenaltyDirichletBC
penalty = 1e5
function_y = 'sin(2*pi*1e9*t)'
boundary = antenna
variable = E_imag
[]
[radiation_condition_real] # First order absorbing boundary condition
type = VectorTransientAbsorbingBC
variable = E_real
coupled_field = E_imag
boundary = boundary
component = real
[]
[radiation_condition_imag]
type = VectorTransientAbsorbingBC
variable = E_imag
coupled_field = E_real
boundary = boundary
component = imaginary
[]
[]
[Preconditioning]
[SMP]
type = SMP
full = true
[]
[]
[Executioner]
type = Transient
solve_type = NEWTON
petsc_options_iname = '-pc_type'
petsc_options_value = 'lu'
num_steps = 150
dt = 0.5e-10
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Outputs]
exodus = true
perf_graph = true
[]
(modules/solid_mechanics/test/tests/central_difference/consistent/1D/1d_consistent_implicit.i)
# Test for Newmark Beta integration for a 1D element
# Consistent mass matrix
[Mesh]
type = GeneratedMesh
xmin = 0
xmax = 10
nx = 5
dim = 1
[]
[Variables]
[./disp_x]
order = FIRST
family = LAGRANGE
[../]
[]
[AuxVariables]
[./accel_x]
[../]
[./vel_x]
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x'
[../]
[./inertia_x]
type = InertialForce
variable = disp_x
[../]
[]
[NodalKernels]
[./force_x]
type = UserForcingFunctorNodalKernel
variable = disp_x
boundary = right
functor = force_x
[../]
[]
[Functions]
[./force_x]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # force
scale_factor = 1e3
[../]
[]
[BCs]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = left
value = 0.0
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = density
prop_values = 2500
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
nl_rel_tol = 1e-8
nl_abs_tol = 1e-8
dtmin = 1e-4
timestep_tolerance = 1e-6
start_time = -0.005
end_time = 0.1
dt = 0.005
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./disp_x]
type = NodalVariableValue
nodeid = 1
variable = disp_x
[../]
[./vel_x]
type = NodalVariableValue
nodeid = 1
variable = vel_x
[../]
[./accel_x]
type = NodalVariableValue
nodeid = 1
variable = accel_x
[../]
[]
[Outputs]
exodus = false
csv = true
perf_graph = false
[]
(modules/solid_mechanics/test/tests/gravity/block-gravity-kinetic-energy.i)
starting_point = 2e-1
offset = 1.0
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Problem]
kernel_coverage_check = false
material_coverage_check = false
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[]
[AuxVariables]
[vel_x]
order = FIRST
family = LAGRANGE
[]
[vel_y]
order = FIRST
family = LAGRANGE
[]
[accel_x]
order = FIRST
family = LAGRANGE
[]
[accel_y]
order = FIRST
family = LAGRANGE
[]
[pid]
order = CONSTANT
family = MONOMIAL
[]
[kinetic_energy]
order = CONSTANT
family = MONOMIAL
[]
[]
[AuxKernels]
[pid]
type = ProcessorIDAux
variable = pid
execute_on = 'initial timestep_end'
[]
[kinetic_energy]
type = KineticEnergyAux
block = '1 2'
variable = kinetic_energy
newmark_velocity_x = vel_x
newmark_velocity_y = vel_y
newmark_velocity_z = 0.0
density = density
[]
[]
[ICs]
[disp_y]
type = ConstantIC
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 0.0
displacements = 'disp_x disp_y'
accelerations = 'accel_x accel_y'
generate_output = 'stress_xx stress_yy'
block = '1 2'
strain = FINITE
[]
[]
[Kernels]
[gravity]
type = Gravity
value = -9.81
variable = disp_y
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e4
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e7
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[]
[Executioner]
type = Transient
end_time = 0.5
dt = 0.01
dtmin = .05
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -snes_linesearch_monitor'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err -ksp_gmres_restart'
petsc_options_value = 'lu NONZERO 1e-15 1e-5 100'
l_max_its = 100
nl_max_its = 20
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = false
csv = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'total_kinetic_energy'
[total_kinetic_energy]
type = ElementIntegralVariablePostprocessor
variable = kinetic_energy
block = '1 2'
[]
[]
(modules/solid_mechanics/test/tests/dynamics/wave_1D/wave_rayleigh_hht_ti.i)
# Wave propogation in 1D using HHT time integration in the presence of Rayleigh damping
#
# The test is for an 1D bar element of length 4m fixed on one end
# with a sinusoidal pulse dirichlet boundary condition applied to the other end.
# alpha, beta and gamma are HHT time integration parameters
# eta and zeta are mass dependent and stiffness dependent Rayleigh damping
# coefficients, respectively.
# The equation of motion in terms of matrices is:
#
# M*accel + (eta*M+zeta*K)*((1+alpha)*vel-alpha*vel_old)
# +(1+alpha)*K*disp-alpha*K*disp_old = 0
#
# Here M is the mass matrix, K is the stiffness matrix
#
# The displacement at the first, second, third and fourth node at t = 0.1 are
# -7.787499960311491942e-02, 1.955566679096475483e-02 and -4.634888180231294501e-03, respectively.
[Mesh]
type = GeneratedMesh
dim = 3
nx = 1
ny = 4
nz = 1
xmin = 0.0
xmax = 0.1
ymin = 0.0
ymax = 4.0
zmin = 0.0
zmax = 0.1
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[]
[AuxVariables]
[./vel_x]
[../]
[./accel_x]
[../]
[./vel_y]
[../]
[./accel_y]
[../]
[./vel_z]
[../]
[./accel_z]
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x disp_y disp_z'
hht_alpha = -0.3
stiffness_damping_coefficient = 0.1
[../]
[./inertia_x]
type = InertialForce
variable = disp_x
eta=0.1
alpha = -0.3
[../]
[./inertia_y]
type = InertialForce
variable = disp_y
eta=0.1
alpha = -0.3
[../]
[./inertia_z]
type = InertialForce
variable = disp_z
eta = 0.1
alpha = -0.3
[../]
[]
[AuxKernels]
[./accel_x] # These auxkernels are only to check output
type = TestNewmarkTI
displacement = disp_x
variable = accel_x
first = false
[../]
[./accel_y]
type = TestNewmarkTI
displacement = disp_y
variable = accel_y
first = false
[../]
[./accel_z]
type = TestNewmarkTI
displacement = disp_z
variable = accel_z
first = false
[../]
[./vel_x]
type = TestNewmarkTI
displacement = disp_x
variable = vel_x
[../]
[./vel_y]
type = TestNewmarkTI
displacement = disp_y
variable = vel_y
[../]
[./vel_z]
type = TestNewmarkTI
displacement = disp_z
variable = vel_z
[../]
[]
[BCs]
[./top_y]
type = DirichletBC
variable = disp_y
boundary = top
value=0.0
[../]
[./top_x]
type = DirichletBC
variable = disp_x
boundary = top
value=0.0
[../]
[./top_z]
type = DirichletBC
variable = disp_z
boundary = top
value=0.0
[../]
[./right_x]
type = DirichletBC
variable = disp_x
boundary = right
value=0.0
[../]
[./right_z]
type = DirichletBC
variable = disp_z
boundary = right
value=0.0
[../]
[./left_x]
type = DirichletBC
variable = disp_x
boundary = left
value=0.0
[../]
[./left_z]
type = DirichletBC
variable = disp_z
boundary = left
value=0.0
[../]
[./front_x]
type = DirichletBC
variable = disp_x
boundary = front
value=0.0
[../]
[./front_z]
type = DirichletBC
variable = disp_z
boundary = front
value=0.0
[../]
[./back_x]
type = DirichletBC
variable = disp_x
boundary = back
value=0.0
[../]
[./back_z]
type = DirichletBC
variable = disp_z
boundary = back
value=0.0
[../]
[./bottom_x]
type = DirichletBC
variable = disp_x
boundary = bottom
value=0.0
[../]
[./bottom_z]
type = DirichletBC
variable = disp_z
boundary = bottom
value=0.0
[../]
[./bottom_y]
type = FunctionDirichletBC
variable = disp_y
boundary = bottom
function = displacement_bc
[../]
[]
[Materials]
[./Elasticity_tensor]
type = ComputeElasticityTensor
block = 0
fill_method = symmetric_isotropic
C_ijkl = '1 0'
[../]
[./strain]
type = ComputeSmallStrain
block = 0
displacements = 'disp_x disp_y disp_z'
[../]
[./stress]
type = ComputeLinearElasticStress
block = 0
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1'
[../]
[]
[Executioner]
type = Transient
start_time = 0
end_time = 6.0
l_tol = 1e-12
nl_rel_tol = 1e-12
dt = 0.1
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.422
gamma = 0.8
[../]
[]
[Functions]
[./displacement_bc]
type = PiecewiseLinear
data_file = 'sine_wave.csv'
format = columns
[../]
[]
[Postprocessors]
[./_dt]
type = TimestepSize
[../]
[./disp_1]
type = NodalVariableValue
nodeid = 1
variable = disp_y
[../]
[./disp_2]
type = NodalVariableValue
nodeid = 3
variable = disp_y
[../]
[./disp_3]
type = NodalVariableValue
nodeid = 10
variable = disp_y
[../]
[./disp_4]
type = NodalVariableValue
nodeid = 14
variable = disp_y
[../]
[]
[Outputs]
file_base = 'wave_rayleigh_hht_out'
exodus = true
perf_graph = true
[]
(modules/solid_mechanics/test/tests/central_difference/consistent/2D/2d_consistent_implicit.i)
# Test for the central difference time integrator for a 2D mesh
[Mesh]
type = GeneratedMesh
dim = 2
nx = 1
ny = 2
xmin = 0.0
xmax = 1.0
ymin = 0.0
ymax = 2.0
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[]
[AuxVariables]
[./vel_x]
[../]
[./accel_x]
[../]
[./vel_y]
[../]
[./accel_y]
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x disp_y'
[../]
[./inertia_x]
type = InertialForce
variable = disp_x
[../]
[./inertia_y]
type = InertialForce
variable = disp_y
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[./accel_y]
type = TestNewmarkTI
variable = accel_y
displacement = disp_y
first = false
[../]
[./vel_y]
type = TestNewmarkTI
variable = vel_y
displacement = disp_y
[../]
[]
[BCs]
[./y_bot]
type = DirichletBC
variable = disp_y
boundary = bottom
value = 0.0
[../]
[./x_bot]
type = PresetDisplacement
boundary = bottom
variable = disp_x
beta = 0.25
velocity = vel_x
acceleration = accel_x
function = disp
[../]
[]
[Functions]
[./disp]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # displacement
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x disp_y'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = density
prop_values = 1e4
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
nl_abs_tol = 1e-11
nl_rel_tol = 1e-11
start_time = -0.01
end_time = 0.1
dt = 0.005
timestep_tolerance = 1e-6
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./_dt]
type = TimestepSize
[../]
[./accel_2x]
type = PointValue
point = '1.0 2.0 0.0'
variable = accel_x
[../]
[./accel_2y]
type = PointValue
point = '1.0 2.0 0.0'
variable = accel_y
[../]
[]
[Outputs]
exodus = false
csv = true
[]
(modules/solid_mechanics/test/tests/central_difference/consistent/3D/3d_consistent_implicit.i)
# One element test for the Newmark-Beta time integrator.
[Mesh]
type = GeneratedMesh # Can generate simple lines, rectangles and rectangular prisms
dim = 3 # Dimension of the mesh
nx = 1 # Number of elements in the x direction
ny = 1 # Number of elements in the y direction
nz = 2 # Number of elements in the z direction
xmin = 0.0
xmax = 1
ymin = 0.0
ymax = 1
zmin = 0.0
zmax = 2
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[]
[AuxVariables]
[./vel_x]
[../]
[./accel_x]
[../]
[./vel_y]
[../]
[./accel_y]
[../]
[./vel_z]
[../]
[./accel_z]
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x disp_y disp_z'
[../]
[./inertia_x]
type = InertialForce
variable = disp_x
[../]
[./inertia_y]
type = InertialForce
variable = disp_y
[../]
[./inertia_z]
type = InertialForce
variable = disp_z
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[./accel_y]
type = TestNewmarkTI
variable = accel_y
displacement = disp_y
first = false
[../]
[./vel_y]
type = TestNewmarkTI
variable = vel_y
displacement = disp_y
[../]
[./accel_z]
type = TestNewmarkTI
variable = accel_z
displacement = disp_z
first = false
[../]
[./vel_z]
type = TestNewmarkTI
variable = vel_z
displacement = disp_z
[../]
[]
[BCs]
[./x_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_x
beta = 0.25
velocity = vel_x
acceleration = accel_x
function = dispx
[../]
[./y_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_y
beta = 0.25
velocity = vel_y
acceleration = accel_y
function = dispy
[../]
[./z_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_z
beta = 0.25
velocity = vel_z
acceleration = accel_z
function = dispz
[../]
[./Periodic]
[./x_dir]
variable = 'disp_x disp_y disp_z'
primary = 'left'
secondary = 'right'
translation = '1.0 0.0 0.0'
[../]
[./y_dir]
variable = 'disp_x disp_y disp_z'
primary = 'bottom'
secondary = 'top'
translation = '0.0 1.0 0.0'
[../]
[../]
[]
[Functions]
[./dispx]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # displacement
[../]
[./dispy]
type = ParsedFunction
expression = 0.1*t*t*sin(10*t)
[../]
[./dispz]
type = ParsedFunction
expression = 0.1*t*t*sin(20*t)
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x disp_y disp_z'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = density
prop_values = 1e4
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
nl_abs_tol = 1e-08
nl_rel_tol = 1e-08
timestep_tolerance = 1e-6
start_time = -0.01
end_time = 0.1
dt = 0.005
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./accel_6x]
type = NodalVariableValue
nodeid = 6
variable = accel_x
[../]
[]
[Outputs]
exodus = false
csv = true
[]
(modules/fsi/test/tests/fsi_acoustics/wave_height_bc/wave_height_bc.i)
# Test for `FluidFreeSurfaceBC` BC with only the fluid domain. The domain is 3D with
# lengths 1 X 1 X 0.01 meters. It is subjected to a 2D Gaussian initial condition
# with the peak at the midpoint (0.5, 0.5, 0.01). Wave heights are recorded at the
# midpoint at different times. The recorded wave heights should match with the values
# that are provided.
# Input parameters:
# Dimensions = 3
# Lengths = 1 X 1 X 0.01 meters
# Fluid speed of sound = 1500 m/s
# Initial condition = 0.00001*exp(-((x-0.5)/0.1)^2-((y-0.5)/0.1)^2)
# Fluid domain = true
# Fluid BCs = pressures are zero on all the four edges of the domain and `FluidFreeSurfaceBC` is applied on the front
# Structural domain = false
[Mesh]
[gen]
type = GeneratedMeshGenerator
dim = 3
nx = 15
ny = 15
nz = 1
xmax = 1
ymax = 1
zmax = 0.01
[]
[]
[GlobalParams]
[]
[Variables]
[./p]
[../]
[]
[AuxVariables]
[./Wave1]
[../]
[]
[Kernels]
[./diffusion]
type = Diffusion
variable = 'p'
[../]
[./inertia]
type = AcousticInertia
variable = p
[../]
[]
[AuxKernels]
[./waves]
type = WaveHeightAuxKernel
variable = 'Wave1'
pressure = p
density = 1e-6
gravity = 9.81
execute_on = timestep_end
[../]
[]
[BCs]
[./leftright_pressure]
type = DirichletBC
variable = p
boundary = 'left right top bottom'
value = 0
[../]
[./free]
type = FluidFreeSurfaceBC
variable = p
boundary = 'front'
alpha = '0.1'
[]
[]
[ICs]
[./u_ic]
type = FunctionIC
variable = 'p'
function = initial_cond
boundary = 'front'
[../]
[]
[Functions]
[./initial_cond]
type = ParsedFunction
expression = '0.00001*exp(-((x-0.5)/0.1)^2-((y-0.5)/0.1)^2)'
[../]
[]
[Materials]
[./co_sq]
type = GenericConstantMaterial
prop_names = inv_co_sq
prop_values = 4.44e-7
[../]
[]
[Executioner]
type = Transient
solve_type = 'NEWTON'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_package'
petsc_options_value = 'lu superlu_dist'
start_time = 0.0
end_time = 0.2
dt = 0.005
dtmin = 0.00001
nl_abs_tol = 1e-12
nl_rel_tol = 1e-12
l_tol = 1e-12
l_max_its = 25
timestep_tolerance = 1e-8
automatic_scaling = true
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Postprocessors]
[./W1]
type = PointValue
point = '0.5 0.5 0.01'
variable = Wave1
[../]
[]
[Outputs]
csv = true
perf_graph = true
print_linear_residuals = true
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics-friction-action.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
[file]
type = FileMeshGenerator
file = long-bottom-block-no-lower-d.e
[]
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 0.05
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[]
[Contact]
[mechanical]
formulation = mortar
model = coulomb
primary = 20
secondary = 10
friction_coefficient = 0.5
c_normal = 1.0e4
c_tangential = 1.0e4
mortar_dynamics = true
newmark_beta = 0.25
newmark_gamma = 0.5
capture_tolerance = 1.0e-5
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 30 # 50
function = '0' # '1e-2*t'
[]
[]
[Executioner]
type = Transient
end_time = 75
dt = 0.05
dtmin = .005
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu NONZERO 1e-15 1e-5'
nl_max_its = 50
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
[]
[VectorPostprocessors]
[mechanical_tangential_lm]
type = NodalValueSampler
block = 'mechanical_secondary_subdomain'
variable = mechanical_tangential_lm
sort_by = 'x'
execute_on = TIMESTEP_END
[]
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
(modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics-light.i)
starting_point = 0.25
offset = 0.00
[GlobalParams]
displacements = 'disp_x disp_y disp_z'
volumetric_locking_correction = true
[]
[AuxVariables]
[mortar_tangent_x]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_y]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_z]
family = LAGRANGE
order = FIRST
[]
[]
[AuxKernels]
[friction_x_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_x
component = 0
boundary = 'top_bottom'
[]
[friction_y_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_y
component = 1
boundary = 'top_bottom'
[]
[friction_z_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_z
component = 2
boundary = 'top_bottom'
[]
[]
[Mesh]
[top_block]
type = GeneratedMeshGenerator
dim = 3
nx = 2
ny = 2
nz = 1
xmin = -0.25
xmax = 0.25
ymin = -0.25
ymax = 0.25
zmin = -0.25
zmax = 0.25
elem_type = HEX8
[]
[rotate_top_block]
type = TransformGenerator
input = top_block
transform = ROTATE
vector_value = '0 0 0'
[]
[top_block_sidesets]
type = RenameBoundaryGenerator
input = rotate_top_block
old_boundary = '0 1 2 3 4 5'
new_boundary = 'top_bottom top_back top_right top_front top_left top_top'
[]
[top_block_id]
type = SubdomainIDGenerator
input = top_block_sidesets
subdomain_id = 1
[]
[bottom_block]
type = GeneratedMeshGenerator
dim = 3
nx = 2
ny = 2
nz = 1
xmin = -.5
xmax = .5
ymin = -.5
ymax = .5
zmin = -.3
zmax = -.25
elem_type = HEX8
[]
[bottom_block_id]
type = SubdomainIDGenerator
input = bottom_block
subdomain_id = 2
[]
[bottom_block_change_boundary_id]
type = RenameBoundaryGenerator
input = bottom_block_id
old_boundary = '0 1 2 3 4 5'
new_boundary = '100 101 102 103 104 105'
[]
[combined]
type = MeshCollectionGenerator
inputs = 'top_block_id bottom_block_change_boundary_id'
[]
[block_rename]
type = RenameBlockGenerator
input = combined
old_block = '1 2'
new_block = 'top_block bottom_block'
[]
[bottom_right_sideset]
type = SideSetsAroundSubdomainGenerator
input = block_rename
new_boundary = bottom_right
block = bottom_block
normal = '1 0 0'
[]
[bottom_left_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_right_sideset
new_boundary = bottom_left
block = bottom_block
normal = '-1 0 0'
[]
[bottom_top_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_left_sideset
new_boundary = bottom_top
block = bottom_block
normal = '0 0 1'
[]
[bottom_bottom_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_top_sideset
new_boundary = bottom_bottom
block = bottom_block
normal = '0 0 -1'
[]
[bottom_front_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_bottom_sideset
new_boundary = bottom_front
block = bottom_block
normal = '0 1 0'
[]
[bottom_back_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_front_sideset
new_boundary = bottom_back
block = bottom_block
normal = '0 -1 0'
[]
[secondary]
input = bottom_back_sideset
type = LowerDBlockFromSidesetGenerator
sidesets = 'top_bottom' # top_back top_left'
new_block_id = '10001'
new_block_name = 'secondary_lower'
[]
[primary]
input = secondary
type = LowerDBlockFromSidesetGenerator
sidesets = 'bottom_top'
new_block_id = '10000'
new_block_name = 'primary_lower'
[]
uniform_refine = 0
allow_renumbering = false
[]
[Variables]
[mortar_normal_lm]
block = 'secondary_lower'
use_dual = true
[]
[mortar_tangential_lm]
block = 'secondary_lower'
use_dual = true
[]
[mortar_tangential_3d_lm]
block = 'secondary_lower'
use_dual = true
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
add_variables = true
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 0.1
displacements = 'disp_x disp_y disp_z'
generate_output = 'stress_xx stress_xy stress_xz stress_yy stress_zz'
block = '1 2'
strain = FINITE
density = density
[]
[]
[Materials]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '1.0'
[]
[tensor]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1.0e4
poissons_ratio = 0.0
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[tensor_1000]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e5
poissons_ratio = 0.0
[]
[stress_1000]
type = ComputeFiniteStrainElasticStress
block = '2'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable_normal = mortar_normal_lm
lm_variable_tangential_one = mortar_tangential_lm
lm_variable_tangential_two = mortar_tangential_3d_lm
secondary_variable = disp_x
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[friction]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
disp_x = disp_x
disp_y = disp_y
disp_z = disp_z
use_displaced_mesh = true
friction_lm = mortar_tangential_lm
friction_lm_dir = mortar_tangential_3d_lm
mu = 0.4
c = 1e4
c_t = 1.0e4
newmark_beta = 0.25
newmark_gamma = 0.5
correct_edge_dropping = true
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[normal_z]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_x
component = x
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_y
component = y
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_z
component = z
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[botz]
type = DirichletBC
variable = disp_z
boundary = 'bottom_left bottom_right bottom_front bottom_back'
value = 0.0
[]
[topx]
type = DirichletBC
variable = disp_x
boundary = 'top_top'
value = 0.0
[]
[topy]
type = DirichletBC
variable = disp_y
boundary = 'top_top'
value = 0.0
[]
[topz]
type = FunctionDirichletBC
variable = disp_z
boundary = 'top_top'
function = '-${starting_point} * sin(2 * pi / 40 * t) + ${offset}'
[]
[]
[Executioner]
type = Transient
end_time = .025
dt = .025
dtmin = .001
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu NONZERO 1e-14'
nl_rel_tol = 1e-11
nl_abs_tol = 1e-11
line_search = 'basic'
[TimeIntegrator]
type = NewmarkBeta
gamma = 0.5
beta = 0.25
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
csv = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'contact'
[contact]
type = ContactDOFSetSize
variable = mortar_normal_lm
subdomain = 'secondary_lower'
execute_on = 'nonlinear timestep_end'
[]
[]
[VectorPostprocessors]
[contact-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_normal_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[frictional-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[frictional-pressure-3d]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_3d_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_x]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_x
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_y]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_y
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[]
(modules/solid_mechanics/test/tests/central_difference/lumped/3D/3d_nodalmass_implicit.i)
# Test for the Newmark-Beta time integrator
[Mesh]
[./generated_mesh]
type = GeneratedMeshGenerator
dim = 3
nx = 1
ny = 1
nz = 2
xmin = 0.0
xmax = 1
ymin = 0.0
ymax = 1
zmin = 0.0
zmax = 2
[../]
[./all_nodes]
type = BoundingBoxNodeSetGenerator
new_boundary = 'all'
input = 'generated_mesh'
top_right = '1 1 2'
bottom_left = '0 0 0'
[../]
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[]
[AuxVariables]
[./vel_x]
[../]
[./accel_x]
[../]
[./vel_y]
[../]
[./accel_y]
[../]
[./vel_z]
[../]
[./accel_z]
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x disp_y disp_z'
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[./accel_y]
type = TestNewmarkTI
variable = accel_y
displacement = disp_y
first = false
[../]
[./vel_y]
type = TestNewmarkTI
variable = vel_y
displacement = disp_y
[../]
[./accel_z]
type = TestNewmarkTI
variable = accel_z
displacement = disp_z
first = false
[../]
[./vel_z]
type = TestNewmarkTI
variable = vel_z
displacement = disp_z
[../]
[]
[BCs]
[./x_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_x
beta = 0.25
velocity = vel_x
acceleration = accel_x
function = dispx
[../]
[./y_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_y
beta = 0.25
velocity = vel_y
acceleration = accel_y
function = dispy
[../]
[./z_bot]
type = PresetDisplacement
boundary = 'back'
variable = disp_z
beta = 0.25
velocity = vel_z
acceleration = accel_z
function = dispz
[../]
[]
[Functions]
[./dispx]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # displacement
[../]
[./dispy]
type = ParsedFunction
expression = 0.1*t*t*sin(10*t)
[../]
[./dispz]
type = ParsedFunction
expression = 0.1*t*t*sin(20*t)
[../]
[]
[NodalKernels]
[./nodal_mass_x]
type = NodalTranslationalInertia
boundary = 'all'
nodal_mass_file = 'nodal_mass_file.csv'
variable = 'disp_x'
[../]
[./nodal_mass_y]
type = NodalTranslationalInertia
boundary = 'all'
nodal_mass_file = 'nodal_mass_file.csv'
variable = 'disp_y'
[../]
[./nodal_mass_z]
type = NodalTranslationalInertia
boundary = 'all'
nodal_mass_file = 'nodal_mass_file.csv'
variable = 'disp_z'
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x disp_y disp_z'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
nl_abs_tol = 1e-08
nl_rel_tol = 1e-08
timestep_tolerance = 1e-6
start_time = -0.01
end_time = 0.1
dt = 0.005
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./accel_10x]
type = NodalVariableValue
nodeid = 10
variable = accel_x
[../]
[]
[Outputs]
exodus = false
csv = true
[]
(modules/fsi/test/tests/fsi_acoustics/3D_struc_acoustic/3D_struc_acoustic.i)
# Test for `StructureAcousticInterface` interface kernel. The domain is 3D with lengths
# 10 X 0.1 X 0.1 meters. The fluid domain is on the right and the structural domain
# is on the left. Fluid end is subjected to a 250Hz sine wave with a single peak.
# Structural domain has the same material properties as the fluid. Interface between
# structure and fluid is located at 5.0m in the x-direction. Fluid pressure is recorded
# at (5, 0.05, 0.05). Structural stress is also recorded at the same location. Fluid
# pressure and structural stress should be almost equal and opposite to each other.
#
# Input parameters:
# Dimensions = 3
# Lengths = 10 X 0.1 X 0.1 meters
# Fluid speed of sound = 1500 m/s
# Fluid density = 1e-6 Giga kg/m^3
# Structural bulk modulus = 2.25 GPa
# Structural shear modulus = 0 GPa
# Structural density = 1e-6 Giga kg/m^3
# Fluid domain = true
# Fluid BC = single peak sine wave applied as a pressure on the fluid end
# Structural domain = true
# Structural BC = Neumann BC with value zero applied on the structural end.
# Fluid-structure interface location = 5.0m along the x-direction
[Mesh]
[gen]
type = GeneratedMeshGenerator
dim = 3
nx = 100
ny = 1
nz = 1
xmax = 10
ymax = 0.1
zmax = 0.1
[]
[./subdomain1]
input = gen
type = SubdomainBoundingBoxGenerator
bottom_left = '5.0 0.0 0.0'
block_id = 1
top_right = '10.0 0.1 0.1'
[../]
[./interface1]
type = SideSetsBetweenSubdomainsGenerator
input = subdomain1
primary_block = 1
paired_block = 0
new_boundary = 'interface1'
[../]
[]
[GlobalParams]
[]
[Variables]
[./p]
block = 1
[../]
[./disp_x]
block = 0
[../]
[./disp_y]
block = 0
[../]
[./disp_z]
block = 0
[../]
[]
[AuxVariables]
[./vel_x]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./accel_x]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./vel_y]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./accel_y]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./vel_z]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./accel_z]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./stress_xx]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[./stress_yy]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[./stress_zz]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[./stress_xy]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[./stress_xz]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[./stress_yz]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[]
[Kernels]
[./diffusion]
type = Diffusion
variable = 'p'
block = 1
[../]
[./inertia]
type = AcousticInertia
variable = p
block = 1
[../]
[./DynamicTensorMechanics]
displacements = 'disp_x disp_y disp_z'
block = 0
[../]
[./inertia_x]
type = InertialForce
variable = disp_x
block = 0
[../]
[./inertia_y]
type = InertialForce
variable = disp_y
block = 0
[../]
[./inertia_z]
type = InertialForce
variable = disp_z
block = 0
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
displacement = disp_x
variable = accel_x
first = false
block = 0
[../]
[./vel_x]
type = TestNewmarkTI
displacement = disp_x
variable = vel_x
block = 0
[../]
[./accel_y]
type = TestNewmarkTI
displacement = disp_y
variable = accel_y
first = false
block = 0
[../]
[./vel_y]
type = TestNewmarkTI
displacement = disp_y
variable = vel_y
block = 0
[../]
[./accel_z]
type = TestNewmarkTI
displacement = disp_z
variable = accel_z
first = false
block = 0
[../]
[./vel_z]
type = TestNewmarkTI
displacement = disp_z
variable = vel_z
block = 0
[../]
[./stress_xx]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_xx
index_i = 0
index_j = 0
block = 0
[../]
[./stress_yy]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_yy
index_i = 1
index_j = 1
block = 0
[../]
[./stress_zz]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_zz
index_i = 2
index_j = 2
block = 0
[../]
[./stress_xy]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_xy
index_i = 0
index_j = 1
block = 0
[../]
[./stress_xz]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_xz
index_i = 0
index_j = 2
block = 0
[../]
[./stress_yz]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_yz
index_i = 1
index_j = 2
block = 0
[../]
[]
[InterfaceKernels]
[./interface1]
type = StructureAcousticInterface
variable = p
neighbor_var = disp_x
boundary = 'interface1'
D = 1e-6
component = 0
[../]
[./interface2]
type = StructureAcousticInterface
variable = p
neighbor_var = disp_y
boundary = 'interface1'
D = 1e-6
component = 1
[../]
[./interface3]
type = StructureAcousticInterface
variable = p
neighbor_var = disp_z
boundary = 'interface1'
D = 1e-6
component = 2
[../]
[]
[BCs]
[./bottom_accel]
type = FunctionDirichletBC
variable = p
boundary = 'right'
function = accel_bottom
[../]
[./disp_x1]
type = NeumannBC
boundary = 'left'
variable = disp_x
value = 0.0
[../]
[./disp_y1]
type = NeumannBC
boundary = 'left'
variable = disp_y
value = 0.0
[../]
[./disp_z1]
type = NeumannBC
boundary = 'left'
variable = disp_z
value = 0.0
[../]
[]
[Functions]
[./accel_bottom]
type = PiecewiseLinear
data_file = ../1D_struc_acoustic/Input_1Peak_highF.csv
scale_factor = 1e-2
format = 'columns'
[../]
[]
[Materials]
[./co_sq]
type = GenericConstantMaterial
prop_names = inv_co_sq
prop_values = 4.44e-7
block = '1'
[../]
[./density0]
type = GenericConstantMaterial
block = 0
prop_names = density
prop_values = 1e-6
[../]
[./elasticity_base]
type = ComputeIsotropicElasticityTensor
bulk_modulus = 2.25
shear_modulus = 0.0
block = 0
[../]
[./strain]
type = ComputeFiniteStrain
block = 0
displacements = 'disp_x disp_y disp_z'
[../]
[./stress]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = 'NEWTON'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_package'
petsc_options_value = 'lu superlu_dist'
start_time = 0.0
end_time = 0.005
dt = 0.0001
dtmin = 0.00001
nl_abs_tol = 1e-8
nl_rel_tol = 1e-8
l_tol = 1e-8
l_max_its = 25
timestep_tolerance = 1e-8
automatic_scaling = true
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Postprocessors]
[./p1]
type = PointValue
point = '5.0 0.05 0.05'
variable = p
[../]
[./stress_xx]
type = PointValue
point = '5.0 0.05 0.05'
variable = stress_xx
[../]
[]
[Outputs]
csv = true
perf_graph = true
print_linear_residuals = true
[]
(modules/solid_mechanics/test/tests/beam/dynamic/dyn_euler_small_rayleigh_hht_ti.i)
# Test for damped small strain euler beam vibration in y direction
# An impulse load is applied at the end of a cantilever beam of length 4m.
# The properties of the cantilever beam are as follows:
# Young's modulus (E) = 1e4
# Shear modulus (G) = 4e7
# Shear coefficient (k) = 1.0
# Cross-section area (A) = 0.01
# Iy = 1e-4 = Iz
# Length (L)= 4 m
# density (rho) = 1.0
# mass proportional rayleigh damping(eta) = 0.1
# stiffness proportional rayleigh damping(eta) = 0.1
# HHT time integration parameter (alpha) = -0.3
# Corresponding Newmark beta time integration parameters beta = 0.4225 and gamma = 0.8
# For this beam, the dimensionless parameter alpha = kAGL^2/EI = 6.4e6
# Therefore, the behaves like a Euler-Bernoulli beam.
# The displacement time history from this analysis matches with that obtained from Abaqus.
# Values from the first few time steps are as follows:
# time disp_y vel_y accel_y
# 0.0 0.0 0.0 0.0
# 0.2 0.019898364318588 0.18838688112273 1.1774180070171
# 0.4 0.045577003505278 0.087329917525455 -0.92596052423724
# 0.6 0.063767907208218 0.084330765885995 0.21274543331268
# 0.8 0.073602908614573 0.020029576220975 -0.45506879373455
# 1.0 0.06841704414745 -0.071840076837194 -0.46041813317992
[Mesh]
type = GeneratedMesh
nx = 10
dim = 1
xmin = 0.0
xmax = 4.0
displacements = 'disp_x disp_y disp_z'
[]
[Variables]
[./disp_x]
order = FIRST
family = LAGRANGE
[../]
[./disp_y]
order = FIRST
family = LAGRANGE
[../]
[./disp_z]
order = FIRST
family = LAGRANGE
[../]
[./rot_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_y]
order = FIRST
family = LAGRANGE
[../]
[./rot_z]
order = FIRST
family = LAGRANGE
[../]
[]
[AuxVariables]
[./vel_x]
order = FIRST
family = LAGRANGE
[../]
[./vel_y]
order = FIRST
family = LAGRANGE
[../]
[./vel_z]
order = FIRST
family = LAGRANGE
[../]
[./accel_x]
order = FIRST
family = LAGRANGE
[../]
[./accel_y]
order = FIRST
family = LAGRANGE
[../]
[./accel_z]
order = FIRST
family = LAGRANGE
[../]
[./rot_vel_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_vel_y]
order = FIRST
family = LAGRANGE
[../]
[./rot_vel_z]
order = FIRST
family = LAGRANGE
[../]
[./rot_accel_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_accel_y]
order = FIRST
family = LAGRANGE
[../]
[./rot_accel_z]
order = FIRST
family = LAGRANGE
[../]
[]
[AuxKernels]
[./accel_x] # These auxkernels are only to check output
type = TestNewmarkTI
displacement = disp_x
variable = accel_x
first = false
[../]
[./accel_y]
type = TestNewmarkTI
displacement = disp_y
variable = accel_y
first = false
[../]
[./accel_z]
type = TestNewmarkTI
displacement = disp_z
variable = accel_z
first = false
[../]
[./vel_x]
type = TestNewmarkTI
displacement = disp_x
variable = vel_x
[../]
[./vel_y]
type = TestNewmarkTI
displacement = disp_y
variable = vel_y
[../]
[./vel_z]
type = TestNewmarkTI
displacement = disp_z
variable = vel_z
[../]
[./rot_accel_x]
type = TestNewmarkTI
displacement = rot_x
variable = rot_accel_x
first = false
[../]
[./rot_accel_y]
type = TestNewmarkTI
displacement = rot_y
variable = rot_accel_y
first = false
[../]
[./rot_accel_z]
type = TestNewmarkTI
displacement = rot_z
variable = rot_accel_z
first = false
[../]
[./rot_vel_x]
type = TestNewmarkTI
displacement = rot_x
variable = rot_vel_x
[../]
[./rot_vel_y]
type = TestNewmarkTI
displacement = rot_y
variable = rot_vel_y
[../]
[./rot_vel_z]
type = TestNewmarkTI
displacement = rot_z
variable = rot_vel_z
[../]
[]
[BCs]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = left
value = 0.0
[../]
[./fixy1]
type = DirichletBC
variable = disp_y
boundary = left
value = 0.0
[../]
[./fixz1]
type = DirichletBC
variable = disp_z
boundary = left
value = 0.0
[../]
[./fixr1]
type = DirichletBC
variable = rot_x
boundary = left
value = 0.0
[../]
[./fixr2]
type = DirichletBC
variable = rot_y
boundary = left
value = 0.0
[../]
[./fixr3]
type = DirichletBC
variable = rot_z
boundary = left
value = 0.0
[../]
[]
[NodalKernels]
[./force_y2]
type = UserForcingFunctorNodalKernel
variable = disp_y
boundary = right
functor = force
[../]
[]
[Functions]
[./force]
type = PiecewiseLinear
x = '0.0 0.2 0.4 10.0'
y = '0.0 0.01 0.0 0.0'
[../]
[]
[Preconditioning]
[./smp]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
line_search = 'none'
l_tol = 1e-11
nl_max_its = 15
nl_rel_tol = 1e-10
nl_abs_tol = 1e-10
start_time = 0.0
dt = 0.2
end_time = 5.0
timestep_tolerance = 1e-6
# Time integrator
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.4225
gamma = 0.8
[../]
[]
[Kernels]
[./solid_disp_x]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 0
variable = disp_x
zeta = 0.1
alpha = -0.3
[../]
[./solid_disp_y]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 1
variable = disp_y
zeta = 0.1
alpha = -0.3
[../]
[./solid_disp_z]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 2
variable = disp_z
zeta = 0.1
alpha = -0.3
[../]
[./solid_rot_x]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 3
variable = rot_x
zeta = 0.1
alpha = -0.3
[../]
[./solid_rot_y]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 4
variable = rot_y
zeta = 0.1
alpha = -0.3
[../]
[./solid_rot_z]
type = StressDivergenceBeam
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
component = 5
variable = rot_z
zeta = 0.1
alpha = -0.3
[../]
[./inertial_force_x]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 0
variable = disp_x
alpha = -0.3
[../]
[./inertial_force_y]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 1
variable = disp_y
alpha = -0.3
[../]
[./inertial_force_z]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 2
variable = disp_z
alpha = -0.3
[../]
[./inertial_force_rot_x]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 3
variable = rot_x
alpha = -0.3
[../]
[./inertial_force_rot_y]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 4
variable = rot_y
alpha = -0.3
[../]
[./inertial_force_rot_z]
type = InertialForceBeam
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
eta = 0.1
area = 0.01
Iy = 1e-4
Iz = 1e-4
Ay = 0.0
Az = 0.0
component = 5
variable = rot_z
alpha = -0.3
[../]
[]
[Materials]
[./elasticity]
type = ComputeElasticityBeam
youngs_modulus = 1.0e4
poissons_ratio = -0.999875
shear_coefficient = 1.0
block = 0
[../]
[./strain]
type = ComputeIncrementalBeamStrain
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y rot_z'
area = 0.01
Ay = 0.0
Az = 0.0
Iy = 1.0e-4
Iz = 1.0e-4
y_orientation = '0.0 1.0 0.0'
[../]
[./stress]
type = ComputeBeamResultants
block = 0
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1.0'
[../]
[]
[Postprocessors]
[./disp_x]
type = PointValue
point = '4.0 0.0 0.0'
variable = disp_x
[../]
[./disp_y]
type = PointValue
point = '4.0 0.0 0.0'
variable = disp_y
[../]
[./vel_y]
type = PointValue
point = '4.0 0.0 0.0'
variable = vel_y
[../]
[./accel_y]
type = PointValue
point = '4.0 0.0 0.0'
variable = accel_y
[../]
[]
[Outputs]
file_base = 'dyn_euler_small_rayleigh_hht_out'
exodus = true
csv = true
perf_graph = true
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-wear.i)
starting_point = 0.5e-1
offset = -0.05
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[worn_depth]
block = '3'
[]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[worn_depth]
type = MortarArchardsLawAux
variable = worn_depth
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
displacements = 'disp_x disp_y'
friction_coefficient = 0.5
energy_wear_coefficient = 1.0
normal_pressure = normal_lm
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[]
[UserObjects]
[weighted_gap_uo]
type = LMWeightedGapUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable = normal_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicWeightedGapLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(8.0 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * t'
[]
[]
[Executioner]
type = Transient
end_time = 0.675
dt = 0.075
dtmin = .075
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type -pc_factor_shift_amount '
petsc_options_value = 'lu superlu_dist NONZERO 1e-15'
nl_max_its = 30
line_search = 'l2'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics-reference.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[kinetic_energy]
order = CONSTANT
family = MONOMIAL
[]
[elastic_energy]
order = CONSTANT
family = MONOMIAL
[]
[]
[AuxKernels]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'timestep_end'
[]
[kinetic_energy]
type = KineticEnergyAux
block = '1 2'
variable = kinetic_energy
newmark_velocity_x = vel_x
newmark_velocity_y = vel_y
newmark_velocity_z = 0.0
density = density
[]
[elastic_energy]
type = ElasticEnergyAux
variable = elastic_energy
block = '1 2'
[]
[]
# User object provides the contact force (e.g. LM)
# for the application of the generalized force
[UserObjects]
[weighted_gap_uo]
type = LMWeightedGapUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable = normal_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
# Not using 'dynamic' constraints results in poor enforcement of contact
# constraints and lack of kinetic and elastic energy conservation.
[weighted_gap_lm]
type = ComputeDynamicWeightedGapLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
newmark_beta = 0.25
newmark_gamma = 0.5
use_displaced_mesh = true
# Capture tolerance is important. If too small, stabilization takes longer
capture_tolerance = 1.0e-5
c = 1.0e6
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 30 # 50
function = '0' # '1e-2*t'
[]
[]
[Executioner]
type = Transient
end_time = 0.275 # 8.0
dt = 0.025
dtmin = .025
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -snes_linesearch_monitor'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu NONZERO 1e-15'
nl_max_its = 50
line_search = 'none'
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
csv = true
[]
[Postprocessors]
active = 'contact total_kinetic_energy total_elastic_energy'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[total_kinetic_energy]
type = ElementIntegralVariablePostprocessor
variable = kinetic_energy
block = '1 2'
[]
[total_elastic_energy]
type = ElementIntegralVariablePostprocessor
variable = elastic_energy
block = '1 2'
[]
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics-friction.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
allow_renumbering = false
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[mechanical_normal_lm]
block = 3
use_dual = true
[]
[mechanical_tangential_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 0.05
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[gap]
block = 3
[]
[]
[AuxKernels]
[gap]
type = WeightedGapAux
variable = gap
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
use_displaced_mesh = true
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[]
# User object provides the contact force (e.g. LM)
# for the application of the generalized force
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable_normal = mechanical_normal_lm
lm_variable_tangential_one = mechanical_tangential_lm
secondary_variable = disp_x
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = mechanical_normal_lm
friction_lm = mechanical_tangential_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
c_t = 1e4
mu = 0.5
newmark_beta = 0.25
newmark_gamma = 0.5
capture_tolerance = 1.0e-5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = mechanical_normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = mechanical_normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = mechanical_tangential_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = mechanical_tangential_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 30 # 50
function = '0' # '1e-2*t'
[]
[]
[Executioner]
type = Transient
end_time = 75
dt = 0.05
dtmin = .005
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu NONZERO 1e-15 1e-5'
nl_max_its = 50
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
csv = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[VectorPostprocessors]
[mechanical_tangential_lm]
type = NodalValueSampler
block = '3'
variable = mechanical_tangential_lm
sort_by = 'x'
execute_on = TIMESTEP_END
[]
[]
(modules/solid_mechanics/test/tests/central_difference/lumped/2D/2d_nodalmass_implicit.i)
# One element test to test the central difference time integrator.
[Mesh]
[./generated_mesh]
type = GeneratedMeshGenerator
dim = 2
xmin = 0
xmax = 1
ymin = 0
ymax = 2
nx = 1
ny = 2
[../]
[./all_nodes]
type = BoundingBoxNodeSetGenerator
new_boundary = 'all'
input = 'generated_mesh'
top_right = '1 2 0'
bottom_left = '0 0 0'
[../]
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[]
[AuxVariables]
[./accel_x]
[../]
[./vel_x]
[../]
[./accel_y]
[../]
[./vel_y]
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[./accel_y]
type = TestNewmarkTI
variable = accel_y
displacement = disp_y
first = false
[../]
[./vel_y]
type = TestNewmarkTI
variable = vel_y
displacement = disp_y
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x disp_y'
[../]
[]
[BCs]
[./y_bot]
type = DirichletBC
variable = disp_y
boundary = bottom
value = 0.0
[../]
[./x_bot]
type = PresetDisplacement
boundary = bottom
variable = disp_x
beta = 0.25
velocity = vel_x
acceleration = accel_x
function = disp
[../]
[]
[Functions]
[./disp]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # displacement
[../]
[]
[NodalKernels]
[./nodal_mass_x]
type = NodalTranslationalInertia
variable = 'disp_x'
nodal_mass_file = 'nodal_mass_file.csv'
boundary = 'all'
[../]
[./nodal_mass_y]
type = NodalTranslationalInertia
variable = 'disp_y'
nodal_mass_file = 'nodal_mass_file.csv'
boundary = 'all'
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x disp_y'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = NEWTON
nl_abs_tol = 1e-11
nl_rel_tol = 1e-11
start_time = -0.01
end_time = 0.1
dt = 0.005
timestep_tolerance = 1e-6
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./accel_2x]
type = PointValue
point = '1.0 2.0 0.0'
variable = accel_x
[../]
[]
[Outputs]
exodus = false
csv = true
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test-projection_angle.i)
starting_point = 0.5e-1
offset = -0.045
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks-multiple-projections-lowerd.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
# scaling = 1.0e-5
[]
[frictional_lm]
block = 3
use_dual = true
# scaling = 1.0e-5
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[worn_depth]
block = '3'
[]
[gap_vel]
block = '3'
[]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[gap_vel]
type = WeightedGapVelAux
variable = gap_vel
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
disp_x = disp_x
disp_y = disp_y
debug_mesh = true
minimum_projection_angle = 0.0
[]
[worn_depth]
type = MortarArchardsLawAux
variable = worn_depth
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
displacements = 'disp_x disp_y'
friction_coefficient = 0.5
energy_wear_coefficient = 1.0e-6
normal_pressure = normal_lm
execute_on = 'TIMESTEP_END'
debug_mesh = true
minimum_projection_angle = 0.0
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
secondary_variable = disp_x
lm_variable_normal = normal_lm
lm_variable_tangential_one = frictional_lm
disp_x = disp_x
disp_y = disp_y
debug_mesh = true
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
wear_depth = worn_depth
c = 1e6
c_t = 1e6
normalize_c = true
mu = 0.5
friction_lm = frictional_lm
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
debug_mesh = true
minimum_projection_angle = 0.0
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
debug_mesh = true
minimum_projection_angle = 0.0
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
debug_mesh = true
minimum_projection_angle = 0.0
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
debug_mesh = true
minimum_projection_angle = 0.0
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
debug_mesh = true
minimum_projection_angle = 0.0
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(4.0 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * (cos(32.0 * pi / 4 * t) - 1.0)'
[]
[]
[Executioner]
type = Transient
end_time = 0.0
dt = 0.05
dtmin = .002
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu superlu_dist NONZERO 1e-15'
nl_max_its = 40
l_max_its = 15
line_search = 'l2'
snesmf_reuse_base = true
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-vel.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[gap_vel]
block = '3'
[]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[gap_vel]
type = WeightedGapVelAux
variable = gap_vel
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
disp_x = disp_x
disp_y = disp_y
correct_edge_dropping = true
execute_on = 'TIMESTEP_END'
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[]
[UserObjects]
[weighted_gap_uo]
type = LMWeightedGapUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable = normal_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicWeightedGapLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * t'
[]
[]
[Executioner]
type = Transient
end_time = 0.1
dt = 0.05
dtmin = 0.05
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu superlu_dist NONZERO 1e-15 1e-5'
nl_max_its = 20
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(test/tests/variables/time_derivatives_neighbor/test.i)
[Mesh]
type = GeneratedMesh
dim = 1
xmin = 0
xmax = 4
nx = 2
[]
[Functions]
[a_fn]
type = ParsedFunction
expression = 't*(t+x)'
[]
[]
[AuxVariables]
[a]
family = MONOMIAL
order = CONSTANT
[]
[]
[AuxKernels]
[a_ak]
type = FunctionAux
variable = a
function = a_fn
[]
[]
[Materials]
[cm]
type = CoupledValuesMaterial
variable = a
[]
[]
[Variables]
[u]
family = MONOMIAL
order = CONSTANT
[]
[]
[Kernels]
[td]
type = TimeDerivative
variable = u
[]
[]
[DGKernels]
[dgk]
type = MatDGKernel
variable = u
mat_prop = a_value
[]
[]
[Executioner]
type = Transient
dt = 1
num_steps = 3
[TimeIntegrator]
type = NewmarkBeta
[]
[Quadrature]
type = GAUSS
order = FIRST
[]
[]
[Outputs]
[./out]
type = Exodus
output_material_properties = true
show_material_properties = 'a_value a_dot a_dot_dot a_dot_du a_dot_dot_du'
execute_on = 'TIMESTEP_END'
[../]
[]
(modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free.i)
# Test to verify the fundamental natural frequency of a one element ADComputeShellStress
# BCs: Clamped on one end, free on others.
# Initial perturbation applied to edge of the beam. After that, the shell vibrates freely.
#
# Results have been compared for various thicknesses with the following approximate Results
# (Moose results were obtained with 8 elements along the length)
# Thickness = 0.1. Reference freq: 10.785 Hz, Moose freq: 10.612 Hz
# Thickness = 0.05. Reference freq: 5.393 Hz, Moose freq: 5.335 Hz
# Thickness = 0.025. Reference freq: 2.696 Hz, Moose freq: 2.660 Hz
#
# Reference values have been obtained from Robert Blevins, "Formulas for Dynamics, Acoustics and Vibration",
# Table 5.3 case 11. Formula looks like: f = lambda^2/(2*pi*a^2) * sqrt(E*h^2/(12*(1-nu*nu))), where lambda
# changes as a function of shell dimensions.
# This test uses one single element for speed reasons.
[Mesh]
type = GeneratedMesh
dim = 2
nx = 1 # 1
ny = 1# 4
xmin = 0.0
xmax = 1.0
ymin = 0.0
ymax = 1.5
displacements = 'disp_x disp_y disp_z'
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[./rot_x]
[../]
[./rot_y]
[../]
[]
[AuxVariables]
[./stress_yy]
order = CONSTANT
family = MONOMIAL
[../]
[./stress_yz]
order = CONSTANT
family = MONOMIAL
[../]
# aux variables for dynamics
[./vel_x]
[../]
[./vel_y]
[../]
[./vel_z]
[../]
[./accel_x]
[../]
[./accel_y]
[../]
[./accel_z]
[../]
[./rot_vel_x]
[../]
[./rot_vel_y]
[../]
[./rot_accel_x]
[../]
[./rot_accel_y]
[../]
[]
[AuxKernels]
[./stress_yy]
type = RankTwoAux
variable = stress_yy
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 1
[../]
[./stress_yz]
type = RankTwoAux
variable = stress_yz
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 2
[../]
# Kernels for dynamics
[./accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_z]
type = NewmarkAccelAux
variable = accel_z
displacement = disp_z
velocity = vel_z
beta = 0.25
execute_on = timestep_end
[../]
[./vel_z]
type = NewmarkVelAux
variable = vel_z
acceleration = accel_z
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_x]
type = NewmarkAccelAux
variable = rot_accel_x
displacement = rot_x
velocity = rot_vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_x]
type = NewmarkVelAux
variable = rot_vel_x
acceleration = rot_accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_y]
type = NewmarkAccelAux
variable = rot_accel_y
displacement = rot_y
velocity = rot_vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_y]
type = NewmarkVelAux
variable = rot_vel_y
acceleration = rot_accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[]
[BCs]
[./fixy1]
type = DirichletBC
variable = disp_y
boundary = 'bottom'
value = 0.0
[../]
[./fixz1]
type = DirichletBC
variable = disp_z
boundary = 'bottom'
value = 0.0
[../]
[./fixr1]
type = DirichletBC
variable = rot_x
boundary = 'bottom'
value = 0.0
[../]
[./fixr2]
type = DirichletBC
variable = rot_y
boundary = 'bottom'
value = 0.0
[../]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = 'bottom'
value = 0.0
[../]
[]
[Functions]
[./force_function]
type = PiecewiseLinear
x = '0.0 0.01 0.15 10.0'
y = '0.0 0.01 0.0 0.0'
[../]
[]
[NodalKernels]
[./force_z2]
type = UserForcingFunctorNodalKernel
variable = disp_z
boundary = 'top'
functor = force_function
[../]
[]
[Kernels]
[./solid_disp_x]
type = ADStressDivergenceShell
block = '0'
component = 0
variable = disp_x
through_thickness_order = SECOND
[../]
[./solid_disp_y]
type = ADStressDivergenceShell
block = '0'
component = 1
variable = disp_y
through_thickness_order = SECOND
[../]
[./solid_disp_z]
type = ADStressDivergenceShell
block = '0'
component = 2
variable = disp_z
through_thickness_order = SECOND
[../]
[./solid_rot_x]
type = ADStressDivergenceShell
block = '0'
component = 3
variable = rot_x
through_thickness_order = SECOND
[../]
[./solid_rot_y]
type = ADStressDivergenceShell
block = '0'
component = 4
variable = rot_y
through_thickness_order = SECOND
[../]
[./inertial_force_x]
type = ADInertialForceShell
# use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 0
variable = disp_x
thickness = 0.1
[../]
[./inertial_force_y]
type = ADInertialForceShell
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 1
variable = disp_y
thickness = 0.1
[../]
[./inertial_force_z]
type = ADInertialForceShell
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 2
variable = disp_z
thickness = 0.1
[../]
[./inertial_force_rot_x]
type = ADInertialForceShell
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 3
variable = rot_x
thickness = 0.1
[../]
[./inertial_force_rot_y]
type = ADInertialForceShell
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 4
variable = rot_y
thickness = 0.1
[../]
[]
[Materials]
[./elasticity]
type = ADComputeIsotropicElasticityTensorShell
youngs_modulus = 2100000
poissons_ratio = 0.3
block = 0
through_thickness_order = SECOND
[../]
[./strain]
type = ADComputeIncrementalShellStrain
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
thickness = 0.1
through_thickness_order = SECOND
[../]
[./stress]
type = ADComputeShellStress
block = 0
through_thickness_order = SECOND
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1.0'
[../]
[]
[Postprocessors]
[./disp_z_tip]
type = PointValue
point = '1.0 1.0 0.0'
variable = disp_z
[../]
[./rot_x_tip]
type = PointValue
point = '0.0 1.0 0.0'
variable = rot_x
[../]
[./stress_yy_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yy
[../]
[./stress_yy_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yy
[../]
[./stress_yy_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yy
[../]
[./stress_yy_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yy
[../]
[./stress_yz_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yz
[../]
[./stress_yz_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yz
[../]
[./stress_yz_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yz
[../]
[./stress_yz_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yz
[../]
[]
[Preconditioning]
[./smp]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = PJFNK
l_tol = 1e-11
nl_max_its = 15
nl_rel_tol = 1e-11
nl_abs_tol = 1e-10
l_max_its = 20
dt = 0.005
dtmin = 0.005
timestep_tolerance = 2e-13
end_time = 0.5
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Outputs]
perf_graph = true
csv = true
[]
(modules/contact/test/tests/mortar_aux_kernels/block-dynamics-aux-fretting-wear-test.i)
starting_point = 0.5e-1
offset = -0.045
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
# scaling = 1.0e-5
[]
[frictional_lm]
block = 3
use_dual = true
scaling = 1.0e-5
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 0.04
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[worn_depth]
block = '3'
[]
[gap_vel]
block = '3'
[]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[gap_vel]
type = WeightedGapVelAux
variable = gap_vel
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
disp_x = disp_x
disp_y = disp_y
[]
[worn_depth]
type = MortarArchardsLawAux
variable = worn_depth
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
displacements = 'disp_x disp_y'
friction_coefficient = 0.5
energy_wear_coefficient = 1.0e-6
normal_pressure = normal_lm
execute_on = 'TIMESTEP_END'
[]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'linear timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'linear timestep_end'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
secondary_variable = disp_x
lm_variable_normal = normal_lm
lm_variable_tangential_one = frictional_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
wear_depth = worn_depth
c = 1e6
c_t = 1e6
normalize_c = true
mu = 0.5
friction_lm = frictional_lm
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = frictional_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(4.0 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-5 * (cos(32.0 * pi / 4 * t) - 1.0)'
[]
[]
[Executioner]
type = Transient
end_time = 0.5
dt = 0.05
dtmin = .002
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_type -pc_factor_shift_type -pc_factor_shift_amount'
petsc_options_value = 'lu superlu_dist NONZERO 1e-15'
nl_max_its = 40
l_max_its = 15
line_search = none
snesmf_reuse_base = true
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'contact'
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/solid_mechanics/test/tests/central_difference/lumped/1D/1d_nodalmass_implicit.i)
# Test for central difference integration for 1D elements
[Mesh]
[./generated_mesh]
type = GeneratedMeshGenerator
xmin = 0
xmax = 10
nx = 5
dim = 1
[../]
[./all_nodes]
type = BoundingBoxNodeSetGenerator
new_boundary = 'all'
input = 'generated_mesh'
top_right = '10 0 0'
bottom_left = '0 0 0'
[../]
[]
[Variables]
[./disp_x]
[../]
[]
[AuxVariables]
[./accel_x]
[../]
[./vel_x]
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
variable = accel_x
displacement = disp_x
first = false
[../]
[./vel_x]
type = TestNewmarkTI
variable = vel_x
displacement = disp_x
[../]
[]
[Kernels]
[./DynamicSolidMechanics]
displacements = 'disp_x'
[../]
[]
[NodalKernels]
[./force_x]
type = UserForcingFunctorNodalKernel
variable = disp_x
boundary = right
functor = force_x
[../]
[./nodal_masses]
type = NodalTranslationalInertia
nodal_mass_file = 'nodal_mass_file.csv'
variable = 'disp_x'
boundary = 'all'
[../]
[]
[Functions]
[./force_x]
type = PiecewiseLinear
x = '0.0 1.0 2.0 3.0 4.0' # time
y = '0.0 1.0 0.0 -1.0 0.0' # force
scale_factor = 1e3
[../]
[]
[BCs]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = left
value = 0.0
[../]
[]
[Materials]
[./elasticity_tensor_block]
type = ComputeIsotropicElasticityTensor
youngs_modulus = 1e6
poissons_ratio = 0.25
block = 0
[../]
[./strain_block]
type = ComputeIncrementalStrain
block = 0
displacements = 'disp_x'
[../]
[./stress_block]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[]
[Executioner]
type = Transient
start_time = -0.01
end_time = 0.1
dt = 0.005
timestep_tolerance = 2e-10
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Postprocessors]
[./accel_x]
type = PointValue
point = '10.0 0.0 0.0'
variable = accel_x
[../]
[]
[Outputs]
exodus = false
csv = true
[]
(test/tests/time_integrators/newmark-beta/newmark_beta_inactive_steps.i)
###########################################################
# This is a simple test with a time-dependent problem
# demonstrating the use of the TimeIntegrator system.
#
# Testing that the active_time parameter works as intended.
#
###########################################################
[Mesh]
type = GeneratedMesh
dim = 2
xmin = -1
xmax = 1
ymin = -1
ymax = 1
nx = 1
ny = 1
[]
[Variables]
[u]
[]
[]
[Functions]
[forcing_fn]
type = PiecewiseLinear
x = '0.0 0.1 0.6'
y = '0.0 1.0 1.0'
[]
[]
[Kernels]
[ie]
type = TimeDerivative
variable = u
[]
[diff]
type = Diffusion
variable = u
[]
[]
[BCs]
[left]
type = DirichletBC
variable = u
boundary = 'left'
value = 0
[]
[right]
type = FunctionDirichletBC
variable = u
boundary = 'right'
function = forcing_fn
[]
[]
[Executioner]
type = Transient
start_time = 0.0
num_steps = 6
dt = 0.1
[TimeIntegrator]
type = NewmarkBeta
inactive_tsteps = 1
[]
[]
[Postprocessors]
[udot]
type = ElementAverageTimeDerivative
variable = u
[]
[udotdot]
type = ElementAverageSecondTimeDerivative
variable = u
[]
[u]
type = ElementAverageValue
variable = u
[]
[]
[Outputs]
csv = true
[]
(modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free_orientation_inclined.i)
# Test to verify the fundamental natural frequency of a one element ADComputeShellStress
# BCs: Clamped on one end, free on others.
# Initial perturbation applied to edge of the beam. After that, the shell vibrates freely.
#
# Results have been compared for various thicknesses with the following approximate Results
# (Moose results were obtained with 8 elements along the length)
# Thickness = 0.1. Reference freq: 10.785 Hz, Moose freq: 10.612 Hz
# Thickness = 0.05. Reference freq: 5.393 Hz, Moose freq: 5.335 Hz
# Thickness = 0.025. Reference freq: 2.696 Hz, Moose freq: 2.660 Hz
#
# Reference values have been obtained from Robert Blevins, "Formulas for Dynamics, Acoustics and Vibration",
# Table 5.3 case 11. Formula looks like: f = lambda^2/(2*pi*a^2) * sqrt(E*h^2/(12*(1-nu*nu))), where lambda
# changes as a function of shell dimensions.
# This test uses one single element for speed reasons.
# Here, the shell, instead of being on the XY plane, is oriented at a 45 deg. angle
# with respect to the Y axis.
[Mesh]
type = FileMesh
file = shell_inclined.e
displacements = 'disp_x disp_y disp_z'
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[./rot_x]
[../]
[./rot_y]
[../]
[]
[AuxVariables]
[./stress_yy]
order = CONSTANT
family = MONOMIAL
[../]
[./stress_yz]
order = CONSTANT
family = MONOMIAL
[../]
# aux variables for dynamics
[./vel_x]
[../]
[./vel_y]
[../]
[./vel_z]
[../]
[./accel_x]
[../]
[./accel_y]
[../]
[./accel_z]
[../]
[./rot_vel_x]
[../]
[./rot_vel_y]
[../]
[./rot_accel_x]
[../]
[./rot_accel_y]
[../]
[]
[AuxKernels]
[./stress_yy]
type = RankTwoAux
variable = stress_yy
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 1
[../]
[./stress_yz]
type = RankTwoAux
variable = stress_yz
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 2
[../]
# Kernels for dynamics
[./accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_z]
type = NewmarkAccelAux
variable = accel_z
displacement = disp_z
velocity = vel_z
beta = 0.25
execute_on = timestep_end
[../]
[./vel_z]
type = NewmarkVelAux
variable = vel_z
acceleration = accel_z
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_x]
type = NewmarkAccelAux
variable = rot_accel_x
displacement = rot_x
velocity = rot_vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_x]
type = NewmarkVelAux
variable = rot_vel_x
acceleration = rot_accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_y]
type = NewmarkAccelAux
variable = rot_accel_y
displacement = rot_y
velocity = rot_vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_y]
type = NewmarkVelAux
variable = rot_vel_y
acceleration = rot_accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[]
[BCs]
[./fixy1]
type = DirichletBC
variable = disp_y
boundary = '0'
value = 0.0
[../]
[./fixz1]
type = DirichletBC
variable = disp_z
boundary = '0'
value = 0.0
[../]
[./fixr1]
type = DirichletBC
variable = rot_x
boundary = '0'
value = 0.0
[../]
[./fixr2]
type = DirichletBC
variable = rot_y
boundary = '0'
value = 0.0
[../]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = '0'
value = 0.0
[../]
[]
[Functions]
[./force_function]
type = PiecewiseLinear
x = '0.0 0.01 0.15 10.0'
y = '0.0 0.01 0.0 0.0'
[../]
[]
[NodalKernels]
[./force_y2]
type = UserForcingFunctorNodalKernel
variable = disp_z
boundary = '2'
functor = force_function
[../]
[]
[Kernels]
[./solid_disp_x]
type = ADStressDivergenceShell
block = '0'
component = 0
variable = disp_x
through_thickness_order = SECOND
[../]
[./solid_disp_y]
type = ADStressDivergenceShell
block = '0'
component = 1
variable = disp_y
through_thickness_order = SECOND
[../]
[./solid_disp_z]
type = ADStressDivergenceShell
block = '0'
component = 2
variable = disp_z
through_thickness_order = SECOND
[../]
[./solid_rot_x]
type = ADStressDivergenceShell
block = '0'
component = 3
variable = rot_x
through_thickness_order = SECOND
[../]
[./solid_rot_y]
type = ADStressDivergenceShell
block = '0'
component = 4
variable = rot_y
through_thickness_order = SECOND
[../]
[./inertial_force_x]
type = ADInertialForceShell
use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 0
variable = disp_x
thickness = 0.1
[../]
[./inertial_force_y]
type = ADInertialForceShell
use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 1
variable = disp_y
thickness = 0.1
[../]
[./inertial_force_z]
type = ADInertialForceShell
use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 2
variable = disp_z
thickness = 0.1
[../]
[./inertial_force_rot_x]
type = ADInertialForceShell
use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 3
variable = rot_x
thickness = 0.1
[../]
[./inertial_force_rot_y]
type = ADInertialForceShell
use_displaced_mesh = true
eta = 0.0
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 4
variable = rot_y
thickness = 0.1
[../]
[]
[Materials]
[./elasticity]
type = ADComputeIsotropicElasticityTensorShell
youngs_modulus = 2100000
poissons_ratio = 0.3
block = 0
through_thickness_order = SECOND
[../]
[./strain]
type = ADComputeIncrementalShellStrain
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
thickness = 0.1
through_thickness_order = SECOND
[../]
[./stress]
type = ADComputeShellStress
block = 0
through_thickness_order = SECOND
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1.0'
[../]
[]
[Postprocessors]
[./disp_z_tip]
type = PointValue
point = '0.0 1.06 1.06'
variable = disp_z
[../]
[./rot_x_tip]
type = PointValue
point = '0.0 1.06 1.06'
variable = rot_x
[../]
[./stress_yy_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yy
[../]
[./stress_yy_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yy
[../]
[./stress_yy_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yy
[../]
[./stress_yy_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yy
[../]
[./stress_yz_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yz
[../]
[./stress_yz_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yz
[../]
[./stress_yz_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yz
[../]
[./stress_yz_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yz
[../]
[]
[Preconditioning]
[./smp]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = PJFNK
l_tol = 1e-11
nl_max_its = 15
nl_rel_tol = 1e-11
nl_abs_tol = 1e-10
l_max_its = 20
dt = 0.005
dtmin = 0.005
timestep_tolerance = 2e-13
end_time = 0.5
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Outputs]
perf_graph = true
csv = true
[]
(modules/fsi/test/tests/fsi_acoustics/1D_struc_acoustic/1D_struc_acoustic.i)
# Test for `StructureAcousticInterface` interface kernel. The domain is 1D with 20m
# length. The fluid domain is on the right and the structural domain is on the left.
# Fluid end is subjected to a 250Hz sine wave with a single peak of amplitude unity.
# Structural domain is 4 times as dense as the fluid domain with all other material
# properties being the same. Fluid pressure is recorded at the midpoint in the fluid
# domain (i.e., at 15m). Structural stress is recorded at the midpoint in the structural
# domain (i.e., at 5m). The recorded pressure and stress amplitudes should match
# with theoretical values.
#
# Input parameters:
# Dimensions = 1
# Length = 20 meters
# Fluid speed of sound = 1500 m/s
# Fluid density = 1e-6 Giga kg/m^3
# Structural bulk modulus = 2.25 GPa
# Structural shear modulus = 0 GPa
# Structural density = 4e-6 Giga kg/m^3
# Fluid domain = true
# Fluid BC = single peak sine wave applied as a pressure on the fluid end
# Structural domain = true
# Structural BC = Neumann BC with value zero applied on the structural end.
[Mesh]
[gen]
type = GeneratedMeshGenerator
dim = 1
nx = 50
xmax = 20
[]
[./subdomain1]
input = gen
type = SubdomainBoundingBoxGenerator
bottom_left = '10.0 0 0'
block_id = 1
top_right = '20.0 0.0 0'
[../]
[./interface1]
type = SideSetsBetweenSubdomainsGenerator
input = subdomain1
primary_block = '1'
paired_block = 0
new_boundary = 'interface1'
[../]
[]
[GlobalParams]
[]
[Variables]
[./p]
block = 1
[../]
[./disp_x]
block = 0
[../]
[]
[AuxVariables]
[./vel_x]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./accel_x]
order = FIRST
family = LAGRANGE
block = 0
[../]
[./stress_xx]
order = CONSTANT
family = MONOMIAL
block = 0
[../]
[]
[Kernels]
[./diffusion]
type = Diffusion
variable = 'p'
block = 1
[../]
[./inertia]
type = AcousticInertia
variable = p
block = 1
[../]
[./DynamicTensorMechanics]
displacements = 'disp_x'
block = 0
[../]
[./inertia_x1]
type = InertialForce
variable = disp_x
block = 0
[../]
[]
[AuxKernels]
[./accel_x]
type = TestNewmarkTI
displacement = disp_x
variable = accel_x
first = false
block = 0
[../]
[./vel_x]
type = TestNewmarkTI
displacement = disp_x
variable = vel_x
block = 0
[../]
[./stress_xx]
type = RankTwoAux
rank_two_tensor = stress
variable = stress_xx
index_i = 0
index_j = 0
block = 0
[../]
[]
[InterfaceKernels]
[./interface1]
type = StructureAcousticInterface
variable = p
neighbor_var = disp_x
boundary = 'interface1'
D = 1e-6
component = 0
[../]
[]
[BCs]
[./bottom_accel]
type = FunctionDirichletBC
variable = p
boundary = 'right'
function = accel_bottom
[../]
[./disp_x1]
type = NeumannBC
boundary = 'left'
variable = disp_x
value = 0.0
[../]
[]
[Functions]
[./accel_bottom]
type = PiecewiseLinear
data_file = Input_1Peak_highF.csv
scale_factor = 1e-2
format = 'columns'
[../]
[]
[Materials]
[./co_sq]
type = GenericConstantMaterial
prop_names = inv_co_sq
prop_values = 4.44e-7
block = '1'
[../]
[./density0]
type = GenericConstantMaterial
block = 0
prop_names = density
prop_values = 4e-6
[../]
[./elasticity_base]
type = ComputeIsotropicElasticityTensor
bulk_modulus = 2.25
shear_modulus = 0.0
block = 0
[../]
[./strain]
type = ComputeFiniteStrain
block = 0
displacements = 'disp_x'
[../]
[./stress]
type = ComputeFiniteStrainElasticStress
block = 0
[../]
[]
[Preconditioning]
[./andy]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = 'NEWTON'
petsc_options_iname = '-pc_type -pc_factor_mat_solver_package'
petsc_options_value = 'lu superlu_dist'
start_time = 0.0
end_time = 0.01
dt = 0.0001
dtmin = 0.00001
nl_abs_tol = 1e-12
nl_rel_tol = 1e-12
l_tol = 1e-12
l_max_its = 25
timestep_tolerance = 1e-8
automatic_scaling = true
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Postprocessors]
[./p1]
type = PointValue
point = '10.0 0.0 0.0'
variable = p
[../]
[./stress1]
type = PointValue
point = '10.0 0.0 0.0'
variable = stress_xx
[../]
[]
[Outputs]
csv = true
perf_graph = true
print_linear_residuals = true
[]
(modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment_free_orientation_inclined_hht.i)
# Test to verify the fundamental natural frequency of a one element ADComputeShellStress
# BCs: Clamped on one end, free on others.
# Initial perturbation applied to edge of the beam. After that, the shell vibrates freely.
#
# Results have been compared for various thicknesses with the following approximate Results
# (Moose results were obtained with 8 elements along the length)
# Thickness = 0.1. Reference freq: 10.785 Hz, Moose freq: 10.612 Hz
# Thickness = 0.05. Reference freq: 5.393 Hz, Moose freq: 5.335 Hz
# Thickness = 0.025. Reference freq: 2.696 Hz, Moose freq: 2.660 Hz
#
# Reference values have been obtained from Robert Blevins, "Formulas for Dynamics, Acoustics and Vibration",
# Table 5.3 case 11. Formula looks like: f = lambda^2/(2*pi*a^2) * sqrt(E*h^2/(12*(1-nu*nu))), where lambda
# changes as a function of shell dimensions.
# This test uses one single element for speed reasons.
# Here, the shell, instead of being on the XY plane, is oriented at a 45 deg. angle
# with respect to the Y axis.
[Mesh]
type = FileMesh
file = shell_inclined.e
displacements = 'disp_x disp_y disp_z'
[]
[Variables]
[./disp_x]
[../]
[./disp_y]
[../]
[./disp_z]
[../]
[./rot_x]
[../]
[./rot_y]
[../]
[]
[AuxVariables]
[./stress_yy]
order = CONSTANT
family = MONOMIAL
[../]
[./stress_yz]
order = CONSTANT
family = MONOMIAL
[../]
# aux variables for dynamics
[./vel_x]
[../]
[./vel_y]
[../]
[./vel_z]
[../]
[./accel_x]
[../]
[./accel_y]
[../]
[./accel_z]
[../]
[./rot_vel_x]
[../]
[./rot_vel_y]
[../]
[./rot_accel_x]
[../]
[./rot_accel_y]
[../]
[]
[AuxKernels]
[./stress_yy]
type = RankTwoAux
variable = stress_yy
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 1
[../]
[./stress_yz]
type = RankTwoAux
variable = stress_yz
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 2
[../]
# Kernels for dynamics
[./accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_z]
type = NewmarkAccelAux
variable = accel_z
displacement = disp_z
velocity = vel_z
beta = 0.25
execute_on = timestep_end
[../]
[./vel_z]
type = NewmarkVelAux
variable = vel_z
acceleration = accel_z
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_x]
type = NewmarkAccelAux
variable = rot_accel_x
displacement = rot_x
velocity = rot_vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_x]
type = NewmarkVelAux
variable = rot_vel_x
acceleration = rot_accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_y]
type = NewmarkAccelAux
variable = rot_accel_y
displacement = rot_y
velocity = rot_vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_y]
type = NewmarkVelAux
variable = rot_vel_y
acceleration = rot_accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[]
[BCs]
[./fixy1]
type = DirichletBC
variable = disp_y
boundary = '0'
value = 0.0
[../]
[./fixz1]
type = DirichletBC
variable = disp_z
boundary = '0'
value = 0.0
[../]
[./fixr1]
type = DirichletBC
variable = rot_x
boundary = '0'
value = 0.0
[../]
[./fixr2]
type = DirichletBC
variable = rot_y
boundary = '0'
value = 0.0
[../]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = '0'
value = 0.0
[../]
[]
[Functions]
[./force_function]
type = PiecewiseLinear
x = '0.0 0.01 0.15 10.0'
y = '0.0 0.01 0.0 0.0'
[../]
[]
[NodalKernels]
[./force_y2]
type = UserForcingFunctorNodalKernel
variable = disp_z
boundary = '2'
functor = force_function
[../]
[]
[Kernels]
[./solid_disp_x]
type = ADStressDivergenceShell
block = '0'
component = 0
variable = disp_x
through_thickness_order = SECOND
[../]
[./solid_disp_y]
type = ADStressDivergenceShell
block = '0'
component = 1
variable = disp_y
through_thickness_order = SECOND
[../]
[./solid_disp_z]
type = ADStressDivergenceShell
block = '0'
component = 2
variable = disp_z
through_thickness_order = SECOND
[../]
[./solid_rot_x]
type = ADStressDivergenceShell
block = '0'
component = 3
variable = rot_x
through_thickness_order = SECOND
[../]
[./solid_rot_y]
type = ADStressDivergenceShell
block = '0'
component = 4
variable = rot_y
through_thickness_order = SECOND
[../]
[./inertial_force_x]
type = ADInertialForceShell
use_displaced_mesh = true
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 0
variable = disp_x
thickness = 0.1
eta = 0.0
alpha = 0.0
[../]
[./inertial_force_y]
type = ADInertialForceShell
use_displaced_mesh = true
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 1
variable = disp_y
thickness = 0.1
eta = 0.0
alpha = 0.0
[../]
[./inertial_force_z]
type = ADInertialForceShell
use_displaced_mesh = true
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 2
variable = disp_z
thickness = 0.1
eta = 0.0
alpha = 0.0
[../]
[./inertial_force_rot_x]
type = ADInertialForceShell
use_displaced_mesh = true
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 3
variable = rot_x
thickness = 0.1
eta = 0.0
alpha = 0.0
[../]
[./inertial_force_rot_y]
type = ADInertialForceShell
use_displaced_mesh = true
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 4
variable = rot_y
thickness = 0.1
eta = 0.0
alpha = 0.0
[../]
[]
[Materials]
[./elasticity]
type = ADComputeIsotropicElasticityTensorShell
youngs_modulus = 2100000
poissons_ratio = 0.3
block = 0
through_thickness_order = SECOND
[../]
[./strain]
type = ADComputeIncrementalShellStrain
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
thickness = 0.1
through_thickness_order = SECOND
[../]
[./stress]
type = ADComputeShellStress
block = 0
through_thickness_order = SECOND
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1.0'
[../]
[]
[Postprocessors]
[./disp_z_tip]
type = PointValue
point = '0.0 1.06 1.06'
variable = disp_z
[../]
[./rot_x_tip]
type = PointValue
point = '0.0 1.06 1.06'
variable = rot_x
[../]
[./stress_yy_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yy
[../]
[./stress_yy_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yy
[../]
[./stress_yy_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yy
[../]
[./stress_yy_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yy
[../]
[./stress_yz_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yz
[../]
[./stress_yz_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yz
[../]
[./stress_yz_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yz
[../]
[./stress_yz_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yz
[../]
[]
[Preconditioning]
[./smp]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = PJFNK
l_tol = 1e-11
nl_max_its = 15
nl_rel_tol = 1e-11
nl_abs_tol = 1e-10
l_max_its = 20
dt = 0.005
dtmin = 0.005
timestep_tolerance = 2e-13
end_time = 0.5
[./TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[../]
[]
[Outputs]
perf_graph = true
csv = true
[]
(modules/contact/test/tests/mortar_dynamics/frictional-mortar-3d-dynamics-light-function.i)
[GlobalParams]
displacements = 'disp_x disp_y disp_z'
volumetric_locking_correction = true
[]
[AuxVariables]
[mortar_tangent_x]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_y]
family = LAGRANGE
order = FIRST
[]
[mortar_tangent_z]
family = LAGRANGE
order = FIRST
[]
[]
[AuxKernels]
[friction_x_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_x
component = 0
boundary = 'top_bottom'
[]
[friction_y_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_y
component = 1
boundary = 'top_bottom'
[]
[friction_z_component]
type = MortarFrictionalPressureVectorAux
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
tangent_one = mortar_tangential_lm
tangent_two = mortar_tangential_3d_lm
variable = mortar_tangent_z
component = 2
boundary = 'top_bottom'
[]
[]
[Mesh]
[top_block]
type = GeneratedMeshGenerator
dim = 3
nx = 2
ny = 2
nz = 1
xmin = -0.25
xmax = 0.25
ymin = -0.25
ymax = 0.25
zmin = -0.25
zmax = 0.25
elem_type = HEX8
[]
[rotate_top_block]
type = TransformGenerator
input = top_block
transform = ROTATE
vector_value = '0 0 0'
[]
[top_block_sidesets]
type = RenameBoundaryGenerator
input = rotate_top_block
old_boundary = '0 1 2 3 4 5'
new_boundary = 'top_bottom top_back top_right top_front top_left top_top'
[]
[top_block_id]
type = SubdomainIDGenerator
input = top_block_sidesets
subdomain_id = 1
[]
[bottom_block]
type = GeneratedMeshGenerator
dim = 3
nx = 2
ny = 2
nz = 1
xmin = -.5
xmax = .5
ymin = -.5
ymax = .5
zmin = -.3
zmax = -.25
elem_type = HEX8
[]
[bottom_block_id]
type = SubdomainIDGenerator
input = bottom_block
subdomain_id = 2
[]
[bottom_block_change_boundary_id]
type = RenameBoundaryGenerator
input = bottom_block_id
old_boundary = '0 1 2 3 4 5'
new_boundary = '100 101 102 103 104 105'
[]
[combined]
type = MeshCollectionGenerator
inputs = 'top_block_id bottom_block_change_boundary_id'
[]
[block_rename]
type = RenameBlockGenerator
input = combined
old_block = '1 2'
new_block = 'top_block bottom_block'
[]
[bottom_right_sideset]
type = SideSetsAroundSubdomainGenerator
input = block_rename
new_boundary = bottom_right
block = bottom_block
normal = '1 0 0'
[]
[bottom_left_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_right_sideset
new_boundary = bottom_left
block = bottom_block
normal = '-1 0 0'
[]
[bottom_top_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_left_sideset
new_boundary = bottom_top
block = bottom_block
normal = '0 0 1'
[]
[bottom_bottom_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_top_sideset
new_boundary = bottom_bottom
block = bottom_block
normal = '0 0 -1'
[]
[bottom_front_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_bottom_sideset
new_boundary = bottom_front
block = bottom_block
normal = '0 1 0'
[]
[bottom_back_sideset]
type = SideSetsAroundSubdomainGenerator
input = bottom_front_sideset
new_boundary = bottom_back
block = bottom_block
normal = '0 -1 0'
[]
[secondary]
input = bottom_back_sideset
type = LowerDBlockFromSidesetGenerator
sidesets = 'top_bottom' # top_back top_left'
new_block_id = '10001'
new_block_name = 'secondary_lower'
[]
[primary]
input = secondary
type = LowerDBlockFromSidesetGenerator
sidesets = 'bottom_top'
new_block_id = '10000'
new_block_name = 'primary_lower'
[]
uniform_refine = 0
[]
[Functions]
# x: Contact pressure
# y: Magnitude of tangential relative velocity
# z: Temperature (to be implemented)
[mu_function]
type = ParsedFunction
expression = '0.3 + 0.5 * 2.17^(-x/100) - 10.0 * y'
[]
[]
[Variables]
[mortar_normal_lm]
block = 'secondary_lower'
use_dual = true
scaling = 1e-3
[]
[mortar_tangential_lm]
block = 'secondary_lower'
use_dual = true
scaling = 1e-3
[]
[mortar_tangential_3d_lm]
block = 'secondary_lower'
use_dual = true
scaling = 1e-3
[]
[]
[Physics/SolidMechanics/Dynamic]
[all]
add_variables = true
hht_alpha = 0.0
newmark_beta = 0.25
newmark_gamma = 0.5
mass_damping_coefficient = 0.0
stiffness_damping_coefficient = 0.02
displacements = 'disp_x disp_y disp_z'
generate_output = 'stress_xx stress_xy stress_xz stress_yy stress_zz'
block = '1 2'
strain = FINITE
density = density
[]
[]
[Materials]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '1.0'
[]
[tensor]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1.0e4
poissons_ratio = 0.0
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1'
[]
[tensor_1000]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e5
poissons_ratio = 0.0
[]
[stress_1000]
type = ComputeFiniteStrainElasticStress
block = '2'
[]
[]
[UserObjects]
[weighted_vel_uo]
type = LMWeightedVelocitiesUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable_normal = mortar_normal_lm
lm_variable_tangential_one = mortar_tangential_lm
lm_variable_tangential_two = mortar_tangential_3d_lm
secondary_variable = disp_x
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[friction]
type = ComputeDynamicFrictionalForceLMMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
disp_x = disp_x
disp_y = disp_y
disp_z = disp_z
use_displaced_mesh = true
friction_lm = mortar_tangential_lm
friction_lm_dir = mortar_tangential_3d_lm
c = 1e5
c_t = 1.0e5
newmark_beta = 0.25
newmark_gamma = 0.5
interpolate_normals = false
correct_edge_dropping = true
capture_tolerance = 1e-04
function_friction = mu_function
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[normal_z]
type = NormalMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_normal_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_gap_uo = weighted_vel_uo
[]
[tangential_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_lm
secondary_variable = disp_z
component = z
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_x]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_x
component = x
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_y]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_y
component = y
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[tangential_dir_z]
type = TangentialMortarMechanicalContact
primary_boundary = 'bottom_top'
secondary_boundary = 'top_bottom'
primary_subdomain = 'primary_lower'
secondary_subdomain = 'secondary_lower'
variable = mortar_tangential_3d_lm
secondary_variable = disp_z
component = z
direction = direction_2
use_displaced_mesh = true
compute_lm_residuals = false
interpolate_normals = false
correct_edge_dropping = true
weighted_velocities_uo = weighted_vel_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 'bottom_left bottom_right bottom_front bottom_back bottom_top bottom_bottom'
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 'bottom_left bottom_right bottom_front bottom_back bottom_top bottom_bottom'
value = 0.0
[]
[botz]
type = DirichletBC
variable = disp_z
boundary = 'bottom_left bottom_right bottom_front bottom_back bottom_top bottom_bottom'
value = 0.0
[]
[topx]
type = FunctionDirichletBC
variable = disp_x
boundary = 'top_top'
function = '0.1*t'
[]
[topy]
type = DirichletBC
variable = disp_y
boundary = 'top_top'
value = 0.0
[]
[topz]
type = FunctionDirichletBC
variable = disp_z
boundary = 'top_top'
function = '-0.1*t'
[]
[]
[Executioner]
type = Transient
end_time = .04
dt = .02
dtmin = .001
solve_type = 'NEWTON'
petsc_options = '-snes_converged_reason -ksp_converged_reason -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type'
petsc_options_value = ' lu NONZERO '
nl_rel_tol = 5e-13
nl_abs_tol = 5e-13
line_search = 'basic'
[TimeIntegrator]
type = NewmarkBeta
gamma = 0.5
beta = 0.25
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
csv = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'contact'
[contact]
type = ContactDOFSetSize
variable = mortar_normal_lm
subdomain = 'secondary_lower'
execute_on = 'nonlinear timestep_end'
[]
[]
[VectorPostprocessors]
[contact-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_normal_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[frictional-pressure]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[frictional-pressure-3d]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangential_3d_lm
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_x]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_x
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[tangent_y]
type = NodalValueSampler
block = secondary_lower
variable = mortar_tangent_y
sort_by = 'id'
execute_on = TIMESTEP_END
[]
[]
(test/tests/kernels/vector_dot_dot/vector_test.i)
# Tests calculation of first and second time derivative
# of a coupled vector variable in a material
# a_vec(x,y,z,t) = [t*(t*x + y), t*y, 0]
# a_vec_dot(x,y,z,t) = [2*t*x + y, y, 0]
# a_vec_dot_dot(x,y,z,t) = [2*x, 0, 0]
#
# IMPORTANT NOTE:
# Currently, this test produces a_vec_dot and a_vec_dot_dot that contains oscillations over time.
# This is a known by-product of Newmark Beta time integration (see the Newmark Beta documentation),
# but as of Summer 2019, there is no alternative time integrator in MOOSE that can dampen these
# oscillations. This test is used as coverage for the function call coupledVectorDotDot.
[Mesh]
type = GeneratedMesh
dim = 2
xmin = 0
xmax = 4
ymin = 0
ymax = 4
nx = 8
ny = 8
[]
[Functions]
[a_fn]
type = ParsedVectorFunction
expression_x = 't * (t * x + y)'
expression_y = 't * y'
expression_z = 0
[]
[]
[AuxVariables]
[a]
family = LAGRANGE_VEC
order = FIRST
[]
[]
[AuxKernels]
[a_ak]
type = VectorFunctionAux
variable = a
function = a_fn
[]
[]
[Materials]
[cm]
type = VectorCoupledValuesMaterial
variable = a
[]
[]
[Variables]
[u] # u is zero
family = LAGRANGE_VEC
order = FIRST
[]
[]
[Kernels]
[td]
type = VectorTimeDerivative
variable = u
[]
[]
[Executioner]
type = Transient
dt = 1
num_steps = 3
[TimeIntegrator]
type = NewmarkBeta
[]
[]
[Outputs]
[./out]
type = Exodus
output_material_properties = true
show_material_properties = 'a_value a_dot a_dot_dot a_dot_du a_dot_dot_du'
execute_on = 'TIMESTEP_END'
[../]
[]
(modules/contact/test/tests/mortar_dynamics/block-dynamics.i)
starting_point = 2e-1
offset = -0.19
[GlobalParams]
displacements = 'disp_x disp_y'
[]
[Mesh]
file = long-bottom-block-1elem-blocks.e
[]
[Variables]
[disp_x]
block = '1 2'
[]
[disp_y]
block = '1 2'
[]
[normal_lm]
block = 3
use_dual = true
[]
[]
[ICs]
[disp_y]
block = 2
variable = disp_y
value = '${fparse starting_point + offset}'
type = ConstantIC
[]
[]
[Kernels]
[DynamicTensorMechanics]
displacements = 'disp_x disp_y'
generate_output = 'stress_xx stress_yy'
strain = FINITE
block = '1 2'
stiffness_damping_coefficient = 1.0
hht_alpha = 0.0
[]
[inertia_x]
type = InertialForce
variable = disp_x
velocity = vel_x
acceleration = accel_x
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[inertia_y]
type = InertialForce
variable = disp_y
velocity = vel_y
acceleration = accel_y
beta = 0.25
gamma = 0.5
alpha = 0
eta = 0.0
block = '1 2'
[]
[]
[Materials]
[elasticity_2]
type = ComputeIsotropicElasticityTensor
block = '2'
youngs_modulus = 1e6
poissons_ratio = 0.3
[]
[elasticity_1]
type = ComputeIsotropicElasticityTensor
block = '1'
youngs_modulus = 1e8
poissons_ratio = 0.3
[]
[stress]
type = ComputeFiniteStrainElasticStress
block = '1 2'
[]
[strain]
type = ComputeFiniteStrain
block = '1 2'
[]
[density]
type = GenericConstantMaterial
block = '1 2'
prop_names = 'density'
prop_values = '7750'
[]
[]
[AuxVariables]
[vel_x]
block = '1 2'
[]
[accel_x]
block = '1 2'
[]
[vel_y]
block = '1 2'
[]
[accel_y]
block = '1 2'
[]
[vel_z]
block = '1 2'
[]
[accel_z]
block = '1 2'
[]
[]
[AuxKernels]
[accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = 'LINEAR timestep_end'
[]
[vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = 'LINEAR timestep_end'
[]
[]
# User object provides the contact force (e.g. LM)
# for the application of the generalized force
[UserObjects]
[weighted_gap_uo]
type = LMWeightedGapUserObject
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
lm_variable = normal_lm
disp_x = disp_x
disp_y = disp_y
[]
[]
[Constraints]
[weighted_gap_lm]
type = ComputeDynamicWeightedGapLMMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
disp_x = disp_x
disp_y = disp_y
use_displaced_mesh = true
c = 1e4
capture_tolerance = 1.0e-5
newmark_beta = 0.25
newmark_gamma = 0.5
[]
[normal_x]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_x
component = x
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[normal_y]
type = NormalMortarMechanicalContact
primary_boundary = 20
secondary_boundary = 10
primary_subdomain = 4
secondary_subdomain = 3
variable = normal_lm
secondary_variable = disp_y
component = y
use_displaced_mesh = true
compute_lm_residuals = false
weighted_gap_uo = weighted_gap_uo
[]
[]
[BCs]
[botx]
type = DirichletBC
variable = disp_x
boundary = 40
value = 0.0
[]
[boty]
type = DirichletBC
variable = disp_y
boundary = 40
value = 0.0
[]
[topy]
type = FunctionDirichletBC
variable = disp_y
boundary = 30
function = '${starting_point} * cos(2 * pi / 4 * t) + ${offset}'
[]
[leftx]
type = FunctionDirichletBC
variable = disp_x
boundary = 50
function = '1e-2 * t'
[]
[]
[Executioner]
type = Transient
end_time = 75
dt = 0.05
dtmin = .05
solve_type = 'PJFNK'
petsc_options = '-snes_converged_reason -ksp_converged_reason -pc_svd_monitor '
'-snes_linesearch_monitor -snes_ksp_ew'
petsc_options_iname = '-pc_type -pc_factor_shift_type -pc_factor_shift_amount -mat_mffd_err '
petsc_options_value = 'lu NONZERO 1e-15 1e-5'
nl_max_its = 20
line_search = 'none'
snesmf_reuse_base = false
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Debug]
show_var_residual_norms = true
[]
[Outputs]
exodus = true
checkpoint = true
[]
[Preconditioning]
[smp]
type = SMP
full = true
[]
[]
[Postprocessors]
active = 'num_nl cumulative contact'
[num_nl]
type = NumNonlinearIterations
[]
[cumulative]
type = CumulativeValuePostprocessor
postprocessor = num_nl
[]
[contact]
type = ContactDOFSetSize
variable = normal_lm
subdomain = '3'
execute_on = 'nonlinear timestep_end'
[]
[]
(modules/solid_mechanics/test/tests/shell/dynamics/shell_dynamics_bending_moment.i)
# Test that models bending of a cantilever beam using shell elements
# A cantilever beam of length 10 m (in Y direction) and cross-section
# 1 m x 0.1 m is modeled using 4 shell elements placed along the length
# (Figure 6a from Dvorkin and Bathe, 1984). All displacements and
# X rotations are fixed on the bottom boundary. E = 2100000 and v = 0.0.
# A load of 0.5 N (in the Z direction) is applied at each node on the top
# boundary resulting in a total load of 1 N.
# The analytical solution for displacement at tip using small strain/rotations # is PL^3/3EI + PL/AG = 1.90485714 m
# The FEM solution using 4 shell elements is 1.875095 m with a relative error
# of 1.5%.
# Similarly, the analytical solution for slope at tip is PL^2/2EI = 0.285714286
# The FEM solution is 0.2857143 and the relative error is 5e-6%.
# The stress_yy for the four elements at z = -0.57735 * (t/2) (first qp below mid-surface of shell) are:
# 3031.089 Pa, 2165.064 Pa, 1299.038 Pa and 433.0127 Pa.
# Note the above values are the average stresses in each element.
# Analytically, stress_yy decreases linearly from y = 0 to y = 10 m.
# The maximum value of stress_yy at y = 0 is Mz/I = PL * 0.57735*(t/2)/I = 3464.1 Pa
# Therefore, the analytical value of stress at z = -0.57735 * (t/2) at the mid-point
# of the four elements are:
# 3031.0875 Pa, 2165.0625 Pa, 1299.0375 Pa ,433.0125 Pa
# The relative error in stress_yy is in the order of 5e-5%.
# The stress_yz at z = -0.57735 * (t/2) at all four elements from the simulation is 10 Pa.
# The analytical solution for the shear stress is: V/2/I *((t^2)/4 - z^2), where the shear force (V)
# is 1 N at any y along the length of the beam. Therefore, the analytical shear stress at
# z = -0.57735 * (t/2) is 10 Pa at any location along the length of the beam.
[Mesh]
type = GeneratedMesh
dim = 2
nx = 1
ny = 4
xmin = 0.0
xmax = 1.0
ymin = 0.0
ymax = 10.0
[]
[Variables]
[./disp_x]
order = FIRST
family = LAGRANGE
[../]
[./disp_y]
order = FIRST
family = LAGRANGE
[../]
[./disp_z]
order = FIRST
family = LAGRANGE
[../]
[./rot_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_y]
order = FIRST
family = LAGRANGE
[../]
[]
[AuxVariables]
[./stress_yy]
order = CONSTANT
family = MONOMIAL
[../]
[./stress_yz]
order = CONSTANT
family = MONOMIAL
[../]
# aux variables for dynamics
[./vel_x]
order = FIRST
family = LAGRANGE
[../]
[./vel_y]
order = FIRST
family = LAGRANGE
[../]
[./vel_z]
order = FIRST
family = LAGRANGE
[../]
[./accel_x]
order = FIRST
family = LAGRANGE
[../]
[./accel_y]
order = FIRST
family = LAGRANGE
[../]
[./accel_z]
order = FIRST
family = LAGRANGE
[../]
[./rot_vel_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_vel_y]
order = FIRST
family = LAGRANGE
[../]
[./rot_accel_x]
order = FIRST
family = LAGRANGE
[../]
[./rot_accel_y]
order = FIRST
family = LAGRANGE
[../]
[]
[AuxKernels]
[./stress_yy]
type = RankTwoAux
variable = stress_yy
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 1
[../]
[./stress_yz]
type = RankTwoAux
variable = stress_yz
rank_two_tensor = global_stress_t_points_0
index_i = 1
index_j = 2
[../]
# Kernels for dynamics
[./accel_x]
type = NewmarkAccelAux
variable = accel_x
displacement = disp_x
velocity = vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./vel_x]
type = NewmarkVelAux
variable = vel_x
acceleration = accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_y]
type = NewmarkAccelAux
variable = accel_y
displacement = disp_y
velocity = vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./vel_y]
type = NewmarkVelAux
variable = vel_y
acceleration = accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[./accel_z]
type = NewmarkAccelAux
variable = accel_z
displacement = disp_z
velocity = vel_z
beta = 0.25
execute_on = timestep_end
[../]
[./vel_z]
type = NewmarkVelAux
variable = vel_z
acceleration = accel_z
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_x]
type = NewmarkAccelAux
variable = rot_accel_x
displacement = rot_x
velocity = rot_vel_x
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_x]
type = NewmarkVelAux
variable = rot_vel_x
acceleration = rot_accel_x
gamma = 0.5
execute_on = timestep_end
[../]
[./rot_accel_y]
type = NewmarkAccelAux
variable = rot_accel_y
displacement = rot_y
velocity = rot_vel_y
beta = 0.25
execute_on = timestep_end
[../]
[./rot_vel_y]
type = NewmarkVelAux
variable = rot_vel_y
acceleration = rot_accel_y
gamma = 0.5
execute_on = timestep_end
[../]
[]
[BCs]
[./fixy1]
type = DirichletBC
variable = disp_y
boundary = 'bottom'
value = 0.0
[../]
[./fixz1]
type = DirichletBC
variable = disp_z
boundary = 'bottom'
value = 0.0
[../]
[./fixr1]
type = DirichletBC
variable = rot_x
boundary = 'bottom'
value = 0.0
[../]
[./fixr2]
type = DirichletBC
variable = rot_y
boundary = 'bottom'
value = 0.0
[../]
[./fixx1]
type = DirichletBC
variable = disp_x
boundary = 'bottom'
value = 0.0
[../]
[]
[Functions]
[./force_function]
type = PiecewiseLinear
x = '0.0 1.0'
y = '0.0 0.5'
[../]
[]
[NodalKernels]
[./force_y2]
type = UserForcingFunctorNodalKernel
variable = disp_z
boundary = 'top'
functor = force_function
[../]
[]
[Kernels]
[./solid_disp_x]
type = ADStressDivergenceShell
block = '0'
component = 0
variable = disp_x
through_thickness_order = SECOND
[../]
[./solid_disp_y]
type = ADStressDivergenceShell
block = '0'
component = 1
variable = disp_y
through_thickness_order = SECOND
[../]
[./solid_disp_z]
type = ADStressDivergenceShell
block = '0'
component = 2
variable = disp_z
through_thickness_order = SECOND
[../]
[./solid_rot_x]
type = ADStressDivergenceShell
block = '0'
component = 3
variable = rot_x
through_thickness_order = SECOND
[../]
[./solid_rot_y]
type = ADStressDivergenceShell
block = '0'
component = 4
variable = rot_y
through_thickness_order = SECOND
[../]
[./inertial_force_x]
type = ADInertialForceShell
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 0
variable = disp_x
thickness = 0.1
[../]
[./inertial_force_y]
type = ADInertialForceShell
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 1
variable = disp_y
thickness = 0.1
[../]
[./inertial_force_z]
type = ADInertialForceShell
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 2
variable = disp_z
thickness = 0.1
[../]
[./inertial_force_rot_x]
type = ADInertialForceShell
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 3
variable = rot_x
thickness = 0.1
[../]
[./inertial_force_rot_y]
type = ADInertialForceShell
block = 0
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
velocities = 'vel_x vel_y vel_z'
accelerations = 'accel_x accel_y accel_z'
rotational_velocities = 'rot_vel_x rot_vel_y'
rotational_accelerations = 'rot_accel_x rot_accel_y'
component = 4
variable = rot_y
thickness = 0.1
[../]
[]
[Materials]
[./elasticity]
type = ADComputeIsotropicElasticityTensorShell
youngs_modulus = 2100000
poissons_ratio = 0.0
block = 0
through_thickness_order = SECOND
[../]
[./strain]
type = ADComputeIncrementalShellStrain
block = '0'
displacements = 'disp_x disp_y disp_z'
rotations = 'rot_x rot_y'
thickness = 0.1
through_thickness_order = SECOND
[../]
[./stress]
type = ADComputeShellStress
block = 0
through_thickness_order = SECOND
[../]
[./density]
type = GenericConstantMaterial
block = 0
prop_names = 'density'
prop_values = '1.0'
[../]
[]
[Postprocessors]
[./disp_z_tip]
type = PointValue
point = '1.0 10.0 0.0'
variable = disp_z
[../]
[./rot_x_tip]
type = PointValue
point = '0.0 10.0 0.0'
variable = rot_x
[../]
[./stress_yy_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yy
[../]
[./stress_yy_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yy
[../]
[./stress_yy_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yy
[../]
[./stress_yy_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yy
[../]
[./stress_yz_el_0]
type = ElementalVariableValue
elementid = 0
variable = stress_yz
[../]
[./stress_yz_el_1]
type = ElementalVariableValue
elementid = 1
variable = stress_yz
[../]
[./stress_yz_el_2]
type = ElementalVariableValue
elementid = 2
variable = stress_yz
[../]
[./stress_yz_el_3]
type = ElementalVariableValue
elementid = 3
variable = stress_yz
[../]
[]
[Preconditioning]
[./smp]
type = SMP
full = true
[../]
[]
[Executioner]
type = Transient
solve_type = PJFNK
petsc_options_iname = '-pc_type'
petsc_options_value = 'lu'
nl_max_its = 2
nl_rel_tol = 1e-10
nl_abs_tol = 5e-8
dt = 0.0005
dtmin = 0.0005
end_time = 1
[TimeIntegrator]
type = NewmarkBeta
beta = 0.25
gamma = 0.5
[]
[]
[Outputs]
csv = true
[]